ЧТО НИБУДЬ ОДНО!
Графики безобразно!
Рис.3. Диаграмма пусковых и тормозных моментов на двигателе
Рис.4. Диаграмма пусковых и тормозных токов якоря
Оценка тепловой нагрузки электрической машины производится методом эквивалентного момента: (Оформление не верно)

Условие
![]() выполняется, следовательно, двигатель
будет работать в нормальном тепловом режиме.
выполняется, следовательно, двигатель
будет работать в нормальном тепловом режиме.
Проведем оценку тепловой нагрузки методом эквивалентного тока:

Условия по эквивалентному току также будет удовлетворять выбору двигателя постоянного тока СЛ-621.
В качестве канала управления частотой вращения выберем якорное регулирование при котором можно менять напряжение на якоре. (КАКОЙ ТО БРЕД, может канаву выбрать, будет дешевле)
Uя= var(знаки пунктуации никто на отменял)
Увеличение величины Uя недопустимо (Не понятно относительно чего?).
Uя <= Uя.н(знаки пунктуации никто на отменял)
Uя1>Uя2>Uя3>Uя4, следовательно (знаки пунктуации никто на отменял) при одном и том же моменте, частота вращения двигателя меняется при изменения напряжения на якоре. Это самый эффективный способ управления частотой вращения, он чаще всего применяется на практике. (Замечание лишнее).
В качестве устройства управления двигателя (БРЕД, чему учили в течении трех семестров по ТАУ? Русский язык тоже обижен) будем использовать реверсивный широтно-импульсный преобразователь (рис. 5).
ВОДА, лучше сослаться на источник информации. Широтно-импульсный преобразователь (ШИП, ШИМ) – строится на электронных ключах. Используется торможение путем противовключения (на обмотке якоря двигателя энергия преобразуется в тепловую). Реверсирование энергии невозможно, поэтому ставят дополнительные сопротивления, которые коммутируются при противовключении двигателя для гашения кинетической энергии. Если двигатель не допускает такую возможность, то ставят дополнительное устройство (сопротивление), куда эта энергия сбрасывается – способ динамического торможения. Применяется достаточно часто.
![]()
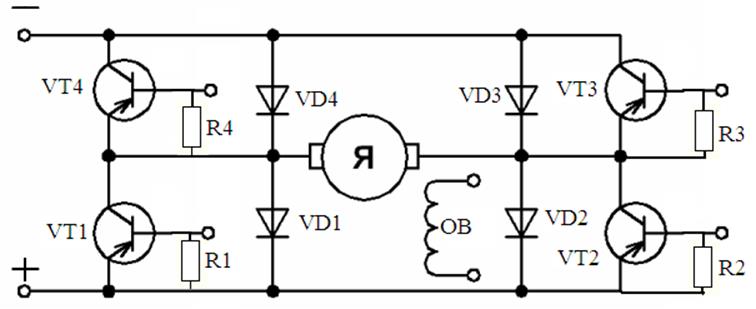
Рис.5 Мостовая схема реверсивного ШИП
Коммутацию ШИП можно осуществлять двумя способами:
- Одновременная
коммутация ключами. В один момент времени VT1,VT3, в другой
момент VT2, VT4. ![]() =>
=> ![]() ; Торможение
можно реализовать используя режим противовключения.
; Торможение
можно реализовать используя режим противовключения.
- Разновременная коммутация. VT1 постоянно включен, коммутируется VT3. При изменении VT1, VT3 на VT2, VT4 изменится знак значит двигатель будет вращаться в другую сторону.
Управление осуществляется по мостовой схеме, образованной четырьмя транзисторными ключами (VT1, VT2, VT3, VT4), к одной диагонали которой подведено напряжение питающей сети, а к другой присоединёны щетки с якоря двигателя.
Диоды (VD1, VD2, VD3, VD4) служат для замыкания цепи якоря через источник напряжения в те отрезки времени, когда ток якоря течёт под действием ЭДС самоиндукции навстречу источнику напряжению.
Ключи работают попарно, т.е., например, на первом интервале замкнуты ключи VT1 и VT3 и на левый зажим якоря
подан плюс, а на втором интервале замкнуты ключи VT2 и VT4 и левый
зажим подан минус источника. В результате к двигателю подается напряжение ![]() . Считая
. Считая  и
учитывая, что
и
учитывая, что ![]() , получим
, получим ![]() .
Следовательно (знаки
пунктуации никто на отменял) механическая характеристика определится
выражением
.
Следовательно (знаки
пунктуации никто на отменял) механическая характеристика определится
выражением  . Изменяя
g, можно изменить не
только значение, но и направление угловой скорости. При 1³g³0,5 угловая скорость при
холостом ходе положительна, при 0,5³g³0 она
отрицательна.
. Изменяя
g, можно изменить не
только значение, но и направление угловой скорости. При 1³g³0,5 угловая скорость при
холостом ходе положительна, при 0,5³g³0 она
отрицательна.
Весьма поверхностно, для составляемого ПТ не актуально. Может быть все надо связать с реализацией регулятора?.

Рис.6. Функциональная схема системы управления ДПТ
Не все представлено и почему это раздел из одного рисунка?
А скорость чем измерять будем?
Разработка функциональной модели ДПТ НВ для моделирования [2] в среде Simulink 5 выполняется под вид уравнений, приведенных ниже:(размеры шрифтов, интервалы между строк)
|
|
где относительные переменные состояния двигателя:
|
Расчеты ведутся в относительных единицах, но при выводе результатов моделирования относительные единицы приводятся к номинальным значениям выбранного двигателя. Функциональные модели ДПТ и нагрузочного момента приведены на рис.7, рис.8.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 ; параметры двигателя
; параметры двигателя
 .
.