







МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧЕРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики

Разработка технического предложения
о возможности реализации системы
электропривода по требованиям
технического задания
Факультет: АВТ Преподаватель: Кондратьев В.А.
Группа: АА- 56
Студент: Кукина А.Ю.
Дата сдачи: 12.05.09
Отметка о защите:
Новосибирск, 2009
Содержание
1. Задание к проектированию. 3
2. Исходные данные. 3
3. Расчеты.. 4
3.1 Расчет среднеквадратичной мощности. 4
3.2 Предварительный выбор двигателя. 5
3.3 Расчет и построение диаграмм токов и моментов при пуске, торможении и установившемся движении. 5
3.4 Оценка тепловой нагрузки двигателя. 7
3.5 Оценка параметров динамической модели двигателя и усилителя мощности. 8
4. Заключение. 14
5. Список литературы.. 14
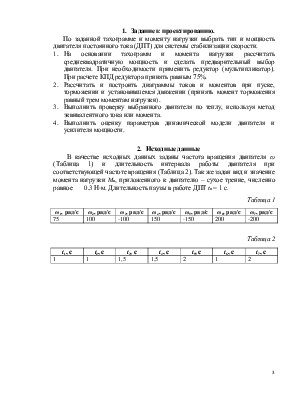
По заданной тахограмме и моменту нагрузки выбрать тип и мощность двигателя постоянного тока (ДПТ) для системы стабилизации скорости.
1. На основании тахограмм и момента нагрузки рассчитать среднеквадратичную мощность и сделать предварительный выбор двигателя. При необходимости применить редуктор (мультипликатор). При расчете КПД редуктора принять равным 75%.
2. Рассчитать и построить диаграммы токов и моментов при пуске, торможении и установившемся движении (принять момент торможения равный трем моментам нагрузки).
3. Выполнить проверку выбранного двигателя по теплу, используя метод эквивалентного тока или момента.
4. Выполнить оценку параметров динамической модели двигателя и усилителя мощности.
В качестве исходных данных заданы частота вращения двигателя ω (Таблица 1) и длительность интервала работы двигателя при соответствующей частоте вращения (Таблица 2). Так же задан вид и значение момента нагрузки Mн, приложенного к двигателю – сухое трение, численно равное 0,3 Н⋅м. Длительность паузы в работе ДПТ tп = 1 с.
Таблица 1
|
ω1, рад/с |
ω2, рад/с |
ω3, рад/с |
ω4, рад/с |
ω5, рад/с |
ω6, рад/с |
ω7, рад/с |
|
75 |
100 |
-100 |
150 |
-150 |
200 |
-200 |
Таблица 2
|
t1, с |
t2, с |
t3, с |
t4, с |
t5, с |
t6, с |
t7, с |
|
1 |
1 |
1,5 |
1,5 |
2 |
1 |
2 |
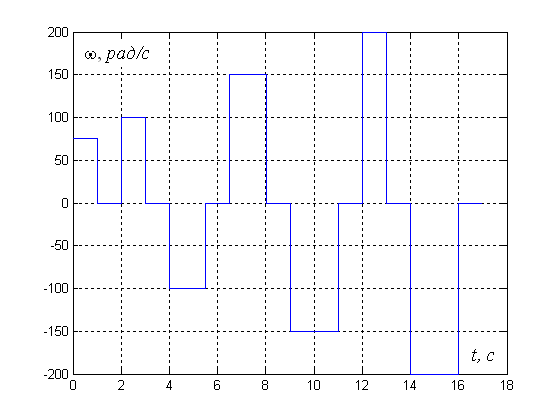
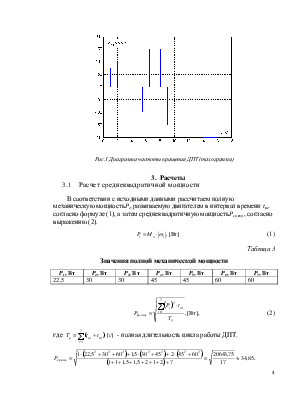
Рис.1 Диаграмма частоты вращения ДПТ (тахограмма)
3.1 Расчет среднеквадратичной мощности
В соответствии с исходными данными рассчитаем полную механическую мощностьPi, развиваемую двигателем в интервал времени tиi, согласно формуле (1), а затем среднеквадратичную мощностьPср.квд., согласно выражению (2).
![]() (1)
(1)
Таблица 3
Значения полной механической мощности
|
P1, Вт |
P2, Вт |
P3, Вт |
P4, Вт |
P5, Вт |
P6, Вт |
P7, Вт |
|
22,5 |
30 |
30 |
45 |
45 |
60 |
60 |
 , (2)
, (2)
где  - полная
длительность цикла работы ДПТ.
- полная
длительность цикла работы ДПТ.
 .
.
3.2 Предварительный выбор двигателя
При выборе ДПТ необходимо, чтобы выполнялись следующие условия:
- среднеквадратичная мощность не должна превышать номинальную;
- нагрузочный момент не должен превышать номинальный;
- заданная максимальная частота вращения двигателя не должна превышать номинальную.
Максимальная частота вращения nmax , об/мин:

Где ωmax – максимальная угловая скорость вращения вала двигателя.
Требования, предъявляемые к ДПТ, следующие:
![]()
Исходя из вышеприведенных требований к ДПТ, выберем «СЛ - 621», обладающий следующими характеристиками:
|
Uн – номинальное напряжение, В |
110 |
|
Pном –номинальная мощность, Вт |
172 |
|
Iв – номинальный ток возбуждения, А |
0,16 |
|
Iя – номинальный ток якоря, А |
2,3 |
|
nном – номинальная частота вращения, об/мин |
2400 |
|
Mном – номинальный вращающий момент, Н⋅м |
0,7 |
|
J – момент инерции якоря, кг⋅см2 |
6,75 |
|
Mпуск – пусковой момент, Н⋅м |
125 |
|
Mст – статический момент трении, Н⋅м |
0,038 |
|
Rв – сопротивление обмотки возбуждения, Ом |
560 |
|
Rя – сопротивление обмотки якоря, Ом |
3,0 |
|
Коэффициент самоиндукции якоря |
35 |
Максимальная частота вращения двигателя составляет порядка 20% от номинальной частоты вращения, т.е. отличается не значительно, следовательно, нет необходимости в использовании редуктора.
3.3 Расчет и построение диаграмм токов и моментов при пуске, торможении и установившемся движении
Время пуска и торможения для каждого момента времени определяется из дифференциального уравнения движения вала двигателя [1], которое имеет вид
 , (3)
, (3)
где Mс – статический момент или момент сопротивления (в общем случае равен сумме нагрузочного момента и момента трения двигателя);
Jпр – момент инерции вращающихся частей, приведенный к валу двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.