Министерство Образования и Науки Российской Федерации
Федеральное агентство по образованию
Новосибирский Государственный Технический Университет
Кафедра Автоматики
Лабораторная работа по дисциплине
«Технические средства автоматизации и управления»
«Исследование следящей системы»
Факультет: АВТ Преподаватель:
Группа: АА-324 Русаков О.П.
Студенты: Зазуля И.Г.
Заремба В.В.
Похлебаева М.С.
Семенцов А.В.
Новосибирск, 2006
1. Цель работы
Исследовать работу следящей системы при гармоническом и линейно-возрастающем сигнале.
2. Исследование системы без обратной связи по скорости
Структурная схема системы приведена на рисунке 1.
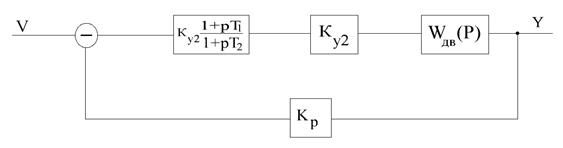
Рис.1. Структурная схема исследуемой системы.
Передаточная функция двигателя  , где
, где

Передаточная функция регулятора 
где

![]()
![]()
Таким образом, передаточная функция системы имеет вид:

Осциллограммы переходных процессов
Входное воздействие: единичное ступенчатое.
Рис.2. Осциллограммы Uвх(t), φ(t), I(t).
Вывод аналитического выражения ошибки в системе:

При
3. Исследование системы с обратной связью по скорости
Структурная схема системы приведена на рисунке 3.
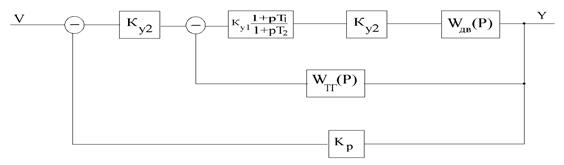
Рис.3. Структурная схема исследуемой системы
Передаточная функция двигателя , где
Передаточная функция регулятора
где

![]()
![]()
Передаточная
функция тахогенератора  , где
, где
Таким образом, передаточная функция системы имеет вид:

Осциллограммы переходных процессов
Входное воздействие: единичное ступенчатое.
Рис.4. Осциллограммы Uвх(t), φ(t), I(t).
Вывод аналитического выражения ошибки в системе:

При
Входное воздействие: линейно-возрастающий сигнал
Рис. 5. Осциллограммы Uвх(t), φ(t).
Входное воздействие: синусоидальный сигнал
Рис. 6. Осциллограммы Uвх(t), φ(t).
4. Определение динамической ошибки в исследуемой системе.
Рис. 7. Осциллограмма ![]() .
.
5. Выводы
В данной лабораторной работе было проведено исследование работы следящей системы при воздействии различных видов входных сигналов: единичной ступенчатой функции, линейно-возрастающем и гармоническом сигналах.
При воздействии на систему сигналом типа ![]() были исследованы переходные процессы по
входному сигналу, по положению и току. При этом в системе без местной обратной
связи время переходного процесса по положению составляет 0.15 с и
перерегулирование 50%, статическая ошибка равна нулю (Рис. 2), включение
обратной связи по скорости приводит к улучшению быстродействия системы (время
переходного процесса 0.06 с ) и уменьшению перерегулирования до 8%, статическая
ошибка остается нулевой (Рис. 4).
были исследованы переходные процессы по
входному сигналу, по положению и току. При этом в системе без местной обратной
связи время переходного процесса по положению составляет 0.15 с и
перерегулирование 50%, статическая ошибка равна нулю (Рис. 2), включение
обратной связи по скорости приводит к улучшению быстродействия системы (время
переходного процесса 0.06 с ) и уменьшению перерегулирования до 8%, статическая
ошибка остается нулевой (Рис. 4).
При линейно-возрастающем сигнале с частотой 15Гц в следящей системе без обратной связи обнаруживается ошибка, значение которой позволяет уменьшить включение обратной связи по скорости.
Исследование системы с местной обратной связью по скорости при подаче на вход синусоидального сигнала с амплитудой 1 В показало, что зависимость положения от времени также представляет собой гармонический сигнал, но при этом наблюдается задержка выходного сигнала на 20 мс (Рис. 6) и имеет место динамическая ошибка с амплитудой 0.5 В (Рис. 7).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.