МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ГОСУДАРСВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра Автоматики
Курсовая работа по теории автоматического управления:
“Система стабилизации скорости вращения двигателя постоянного тока”
Факультет АВТ
Группа АА-86
Студент: Григорьева Е.В. Преподаватель:
Французова Г.А.
Вариант: 2.2
Новосибирск, 2011
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
Требуется рассчитать систему стабилизации скорости вращения двигателя постоянного тока с независимым возбуждением (рис.1).
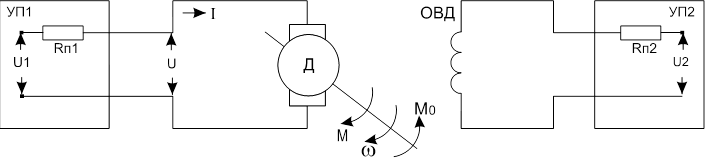
Рис.1. Схема управления двигателем постоянного тока с независимым возбуждением.
УП1, УП2 – управляемые преобразователи для питания якорной цепи и обмотки возбуждения двигателя;
Д – двигатель постоянного тока.
ОВД – обмотка возбуждения двигателя.
Rп1, Rп2 – активные сопротивления преобразователей.
U, I – напряжение и ток на якоре двигателя.
w – угловая скорость вращения двигателя.
М – момент, развиваемый двигателем.
МС – момент сопротивления на валу двигателя, преодоление которого обычно является технологическим назначением двигателя.
U1, U2 – напряжение на входах управляемых преобразователей.
Цель управления заключается в стабилизации скорости вращения двигателя w. Причем выход на заданную скорость вращения должен осуществляться за время tп с перерегулированием не более s. Максимальное отклонение по скорости не должно превышать значения Dwm при МС = МН, МН = СфНIН.
Исходные данные для расчета параметров регулятора приведены в таблице 1.
|
Паспортные данные двигателя |
Pп |
Jд [кг×м2] |
tп [c] |
s % |
Dwm/wн % |
||||
|
Рн [кВт] |
Uн [В] |
Iн [A] |
wн [рад/c] |
h |
|||||
|
0,55 |
220 |
3,2 |
102,7 |
0,7 |
2 |
0,005 |
0,55 |
10 |
3,2 |
СОДЕРЖАНИЕ
Анализ устройства как объекта автоматического управления ……………..4
Описание математической модели системы ..………………………………..5
Анализ свойств математической модели системы …………………………...8
Синтез системы управления ………………….………………………………..10
Список использованной литературы ..………………………………………..13
АНАЛИЗ УСТРОЙСТВА КАК ОБЪЕКТА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Система стабилизации скорости вращения двигателя постоянного тока – система, в которой скорость вращения двигателя зависит от величины напряжения на якоре двигателя.
Данная система может рассматриваться как объект регулирования скорости вращения двигателя.
Система состоит из двигателя постоянного тока, тахогенератора и двух управляемых преобразователей. Тахогенератор выполняет функцию регулирующего органа.
В зависимости от скорости вращения двигателя, тахогенератор генерирует напряжение, которое сравнивается с входным напряжением. Разность входного напряжения и напряжения с тахогенератора поступает на регулятор, который регулирует напряжение на якоре двигателя, а соответственно и скорость вращения двигателя.

Рис.2. Схема системы управления двигателем.
ОПИСАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СИСТЕМЫ
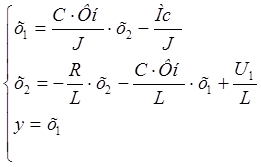
На основании физических законов и при допущении, что инерционность управляемых преобразователей существенно ниже инерционности процессов в двигателе, можно записать математическую модель системы в линейном приближении:
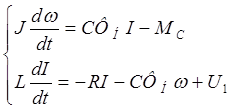
где J – момент инерции двигателя совместно с приведенным значением момента инерции механизма; Фн – номинальное значение потока возбуждения двигателя; С – коэффициент, зависящий от конструкции двигателя; L = LП + LЯ , R = RП1 + RЯ – индуктивность и активное сопротивление якорной цепи «преобразователь – двигатель».
Введем переменные состояния: х1 = w , х2 = I ,
y = w = х1 .
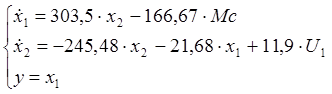
Тогда система уравнений примет вид:
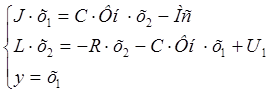
или
Определим коэффициенты в системе уравнений
Для электроприводов общепромышленных механизмов:
J = (1,1 … 1,25) Jд = 1,2* Jд =0,006 кг×м2 .
Параметры якорной цепи двигателя определяются на основе паспортных данных. Активное сопротивление якорной цепи двигателя находят по выражению

Активное сопротивление преобразователя соизмеримо с сопротивлением нагрузки
(RП1 » RЯ).
Активное сопротивление якорной цепи «преобразователь – двигатель»:
![]()
Индуктивность якорной цепи:


Индуктивностью преобразователя можно пренебречь (LП << LЯ), тогда индуктивность цепи «преобразователь-двигатель» равна:
L = LЯ = 0,084 Гн.
Произведение СФн определяется по соотношению
 .
.
После подстановки найденных величин в систему уравнений, она запишется следующим образом:
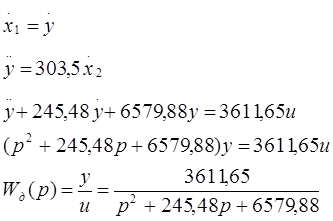
Определим передаточную функцию двигателя Wд(p):
Для выбора тахогенератора воспользуемся выражением:
![]()
![]() =>
=> 
Выберем тахогенератор ТД-103-ПМ, параметры которого:
![]()
Тогда передаточная функция тахогенератора примет вид:
Общая передаточная функция объекта управления:

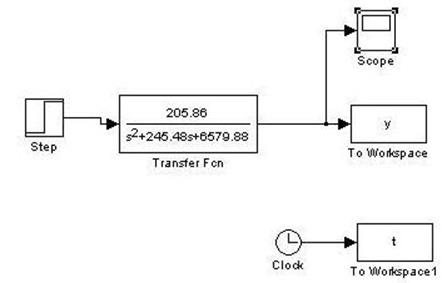
Рис 1. Структурная схема объекта управления
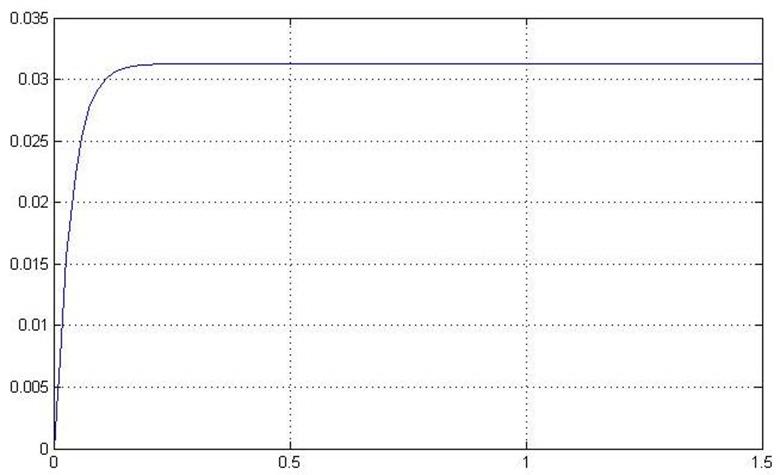
Рис 2. Переходный процесс в объекте управления
Путем имитационного моделирования исследованы собственные свойства
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.