СБОРНИК НАУЧНЫХ ТРУДОВ НГТУ. – 2009. – № 2(56). – 3–10
автоматическое управление и идентификация
УДК 681.513
СТАБИЛИЗАЦИЯ ДВУХМАССОВОЙ СИСТЕМЫ: МОДАЛЬНЫЙ МЕТОД СИНТЕЗА
А.А. Воевода©, Е.А. Ижицкая§,
Сформулирована технология синтеза системы АУ модальным методом на примере объекта, представляющего два консервативных звена, и регулятор полного порядка. Подразумевается, что регулятор рассчитывается на основе использования диофантова уравнения. Приведенная технология может быть использована в качестве шаблона для синтеза систем с произвольным объектом модальным методом.
Пусть рассматривается объект управления в общем виде

где m<n.
Число коэффициентом соответственно m + 1 и n + 1. Такое описание избыточно, поэтому коэффициент при старшей степени полинома знаменателя an+1 можно сделать равным единице, разделив на него все коэффициенты.
Пусть передаточная функция регулятора имеет вид

Степень каждого полинома n–1, количество коэффициентов – 2n. Описание и здесь избыточное, поэтому коэффициент βn–1 при степени n–1 полинома знаменателя также можно привести к 1.
Передаточная функция замкнутой системы

т. е. характеристический полином замкнутой системы
![]()
будет иметь степень 2n–1 и 2n
коэффициентов. Здесь ![]() , где
, где ![]() , как
следствие из равенств an=1 и βn–1=1.
Коэффициенты желаемого полинома
, как
следствие из равенств an=1 и βn–1=1.
Коэффициенты желаемого полинома ![]()
Приравнивая коэффициенты действительного и желаемого уравнений, получаем систему
![]()
где A включает коэффициенты объекта; x – искомые коэффициенты регулятора, b – коэффициенты желаемого характеристического полинома. Рассмотрим метод на примере.
Пусть рассматривается объект 5-го порядка

Синтезируем систему АУ с регулятором полного порядка для этого объекта

Характеристический полином замкнутой системы (ХПЗС)
Пусть все полюсы желаемого ХПЗС будут равны единице

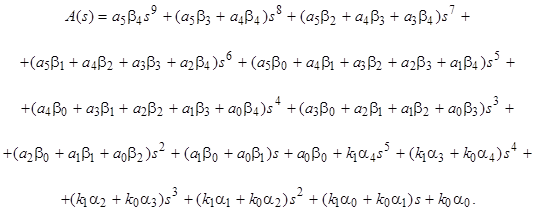
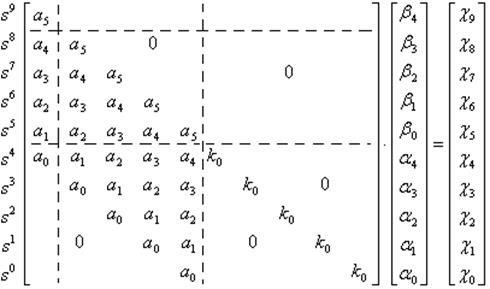
Для удобства вычисления ХПЗС можно представить в матричном виде
 .
.
Представим матрицы в следующем виде:
 .
.
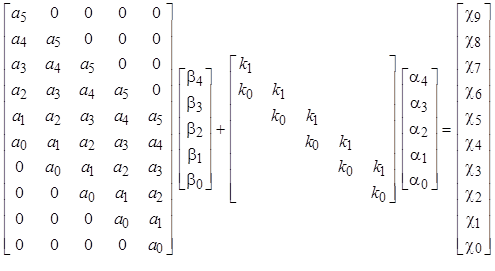
Рассмотрим частный случай ![]()
![]()
![]()
Объединим вышеприведенные матрицы в одну на основе следующих соображений:

Объединив матрицы коэффициентов, получим
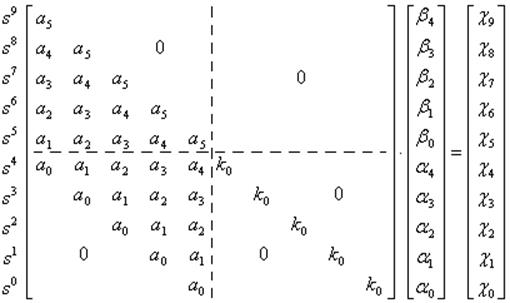 .
.
 Рассмотрим
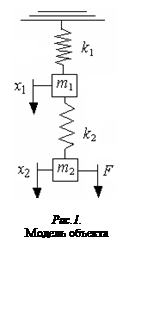
синтез для объекта, представляющего собой два консервативных звена.
Рассмотрим
синтез для объекта, представляющего собой два консервативных звена.
Модель объекта представляет собой систему из двух грузов разной массой m1 и m2, подвешенных последовательно на двух пружинах разной жесткости k1 и k2, Управляющее воздействие F приложено ко вторму грузу, измеряемая переменная – x1.
Координаты x1 и x2 отсчитываются от состояния равновесия.
Уравнение первого звена
![]()
Уравнение второго звена
![]()
Сведем к одному уравнению
![]()
Дважды дифференцируя,
подставим в уравнение выражение ![]()
![]()


В операторной форме данное уравнение принимает вид

Передаточная функция объекта
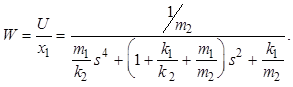
Домножая на k2, получаем передаточную функцию объекта
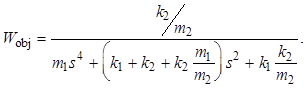
Для простоты подберем коэффициенты системы так, чтобы получить объект
Потребуем астатизма системы, для чего введем интегратор, который отнесем к объекту. Таким образом,

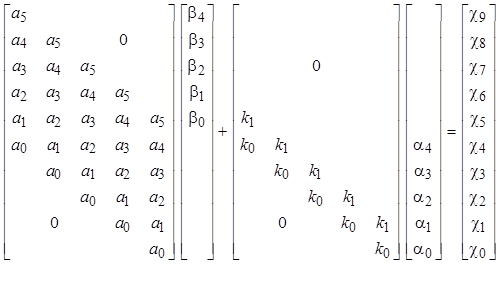
Для приведенного объекта:
![]()
![]()
![]()
Поскольку ![]()
![]()
![]() то
первая строка матрицы коэффициентов объекта, умноженная на первую строку
матрицы коэффициентов регулятора, всегда даст единицу в матрице коэффициентов
желаемого уравнения системы, следовательно, это уравнение не влияет на
дальнейшие расчеты и первую строку каждой матрицы можно исключить из
дальнейшего анализа:
то
первая строка матрицы коэффициентов объекта, умноженная на первую строку
матрицы коэффициентов регулятора, всегда даст единицу в матрице коэффициентов
желаемого уравнения системы, следовательно, это уравнение не влияет на
дальнейшие расчеты и первую строку каждой матрицы можно исключить из
дальнейшего анализа:
Запишем эту матрицу без первой строки, которая не влияет на вычисления, и отнимем первый столбец матрицы коэффициентов объекта от матрицы коэффициентов желаемого ХПЗС:
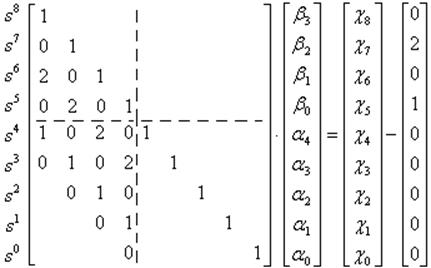
Обозначим
матрицы следующим образом: матрица коэффициентов слева – A, матрица коэффициентов желаемого ХПЗС –
В, матрица вычитаемых коэффициентов – С, матрица искомых
коэффициентов регулятора – X. Тогда:![]() Искомое решение
Искомое решение
![]()
Запишем передаточную функцию регулятора с полученными коэффициентами

Проверка показывает, что передаточная функция замкнутой системы

Таким образом, знаменатель передаточной функции замкнутой системы совпадает с заданным желаемым уравнением.
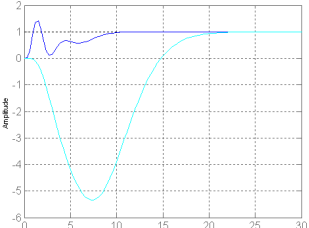
Переходный процесс в системе показан на рисунке светлой линией.
Time, s
Переходные процессы, полученные для замкнутой системы с желаемыми полюсами: 1 – светлая линия и 2 – темная линия
Такой вид переходного процесса связан со сложностью объекта, для которого синтезируется регулятор, и с требуемым расположением корней. Зададим желаемый характеристический полином замкнутой системы
![]()
Переходный процесс в системе показан на рисунке темной линией.
В заключение следует отметить, что задание желаемых полюсов замкнутой системы в общем случае не позволяет получить требуемые качества переходного процесса. Кроме того, в передаточной функции замкнутой системы объединены нули объекта и регулятора, которые могут существенно влиять на вид переходного процесса. Это подсказка для задания всех полюсов или их части либо части нулей системы.
При вычислении коэффициентов регулятора в MatLab удобно использовать операторное выражение: X=inv(A)(B–C).
© Профессор кафедры автоматики, д-р техн. наук
§ Бакалавр техники и технологии кафедры автоматики
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.



