Поиск экстремума с целью определения параметров регулятора МЕТОДОМ СИМПЛЕКС-ПЛАНИРОВАНИЯ
(нумерация формул в пределах раздела)
Изложение выполнено применительно к вычислительному эксперименту для итерационной настройки параметров регулятора.
Весьма удобным для параметрического синтеза устройств и систем автоматики представляется использование симплекс-планирования. Развитие этого метода известно как метод деформируемого многогранника или метод Нелдера-Мида. Примеры его использования можно найти в демонстрационных программах Simulink (Blocsets &Toolboxes/NCD Blocset/например, ncd demo3).
Для выполнения курсовой работы достаточно решать задачу выбора параметров настройки регулятора путем целенаправленного перебора вариантов, проводя вычислительный эксперимент и руководствуясь изложенными ниже определениями и положениями симплекс-планирования.
Симплексом называют многогранник, имеющий k+1 вершину в пространстве k факторов, каждая из которых определяется пересечением k гиперплоскостей данного пространства. В пространстве одного фактора (k = 1) симплексом служит отрезок установленного размера, при k = 2 – треугольник, при k = 3 – тетраэдр.
Метод позволяет совмещать пробные опыты для определения направления движения с рабочим движением по поверхности отклика к области оптимума. Основная идея метода заключается в том, что проводятся опыты во всех k + 1 вершинах симплекса и по величине отклика в них определяется направление движения к экстремуму.
При планировании вычислительных экспериментов используются регулярные симплексы (расстояния между всеми его вершинами равны). Однако регулярность симплекса и свойство ротатабельности планов (при работе со случайными величинами – оценка результатов с одинаковым рассеянием) не будут инвариантными к масштабу координат факторного пространства. Это не отвечает условиям поиска области экстремума с надлежащей точностью. При изменении масштаба регулярный симплекс может стать нерегулярным. Чтобы сделать симплекс регулярным, используется линейное преобразование:
 ,
(1)
,
(1)
где ![]() − j-я координата центра плана (начальное
значение варьируемого параметра, j = 1, 2, …, k);
− j-я координата центра плана (начальное
значение варьируемого параметра, j = 1, 2, …, k);
![]() − интервал варьирования по j-му параметру; Xj – абсолютное значение варьируемого
параметра.
− интервал варьирования по j-му параметру; Xj – абсолютное значение варьируемого
параметра.
Метод последовательного симплекс-планирования характеризуется следующей последовательностью действий.
1. Для всех варьируемых
параметров выбираются начальные значения ![]() и
интервалы их варьирования
и
интервалы их варьирования ![]() . От выбора этих величин
зависит качество и длительность поиска, поэтому решение принимается на
компромиссной основе и априорных представлениях о поверхности отклика.
Существенное значение имеет исходное значение вектора
. От выбора этих величин
зависит качество и длительность поиска, поэтому решение принимается на
компромиссной основе и априорных представлениях о поверхности отклика.
Существенное значение имеет исходное значение вектора ![]() (близость
к области экстремума). Для выбора интервала варьирования реально можно исходить
из
(близость
к области экстремума). Для выбора интервала варьирования реально можно исходить
из ![]() . В области экстремума величину интервала
можно уменьшить, изменив в плане эксперимента размер грани симплекса.
. В области экстремума величину интервала
можно уменьшить, изменив в плане эксперимента размер грани симплекса.
2. Вычисляются координаты вершин начального симплекса. При совмещении центра симплекса с началом координат и размещении одной из вершин на координатной оси план эксперимента для k факторов состоит из k столбцов и k+1 строк:
 . (2)
. (2)
Кодированные значения факторов принимают значения:
 ,
(3)
,
(3)
где t - длина стороны симплекса (за исходное значение следует принимать t = 1, при необходимости более точного поиска в области экстремума по мере приближения к нему можно принять t < 1).
Для практического использования матрицы (2) по формуле (3) подсчитаны и ниже приведены числовые значения её элементов, линиями выделен план для k=5:
 .
.
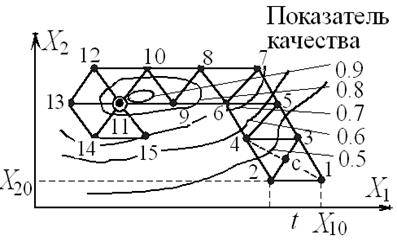
Последующие действия на примере k = 2 иллюстрирует приведенный рисунок.
|
|
|
Восхождение по поверхности отклика симплекс-методом при k=2 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.