Цель работы:
Исследовать метод моделирования непрерывных объектов управления с помощью элементов сдвига по времени.
Исходные данные:
K=1,5; T=0,2; T1=0,6; T0=01.
1.
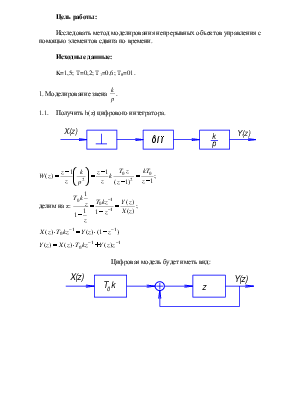
Моделирование звена ![]() .
.
1.1. Получить h(z) цифрового интегратора.


делим
на z: 
![]()
![]()
Цифровая модель будет иметь вид:
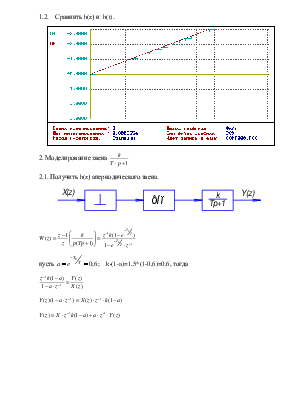
1.2. Сравнить h(z) и h(t).

2.
Моделирование звена 
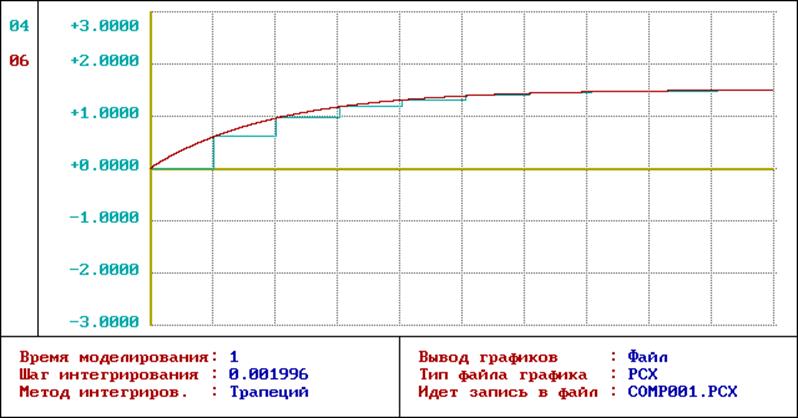
2.1. Получить h(z) апериодического звена.

пусть
![]() ; k×(1-a)=1,5*(1-0,6)=0,6,
тогда
; k×(1-a)=1,5*(1-0,6)=0,6,
тогда
![]()
![]()
Цифровая модель имеет вид:
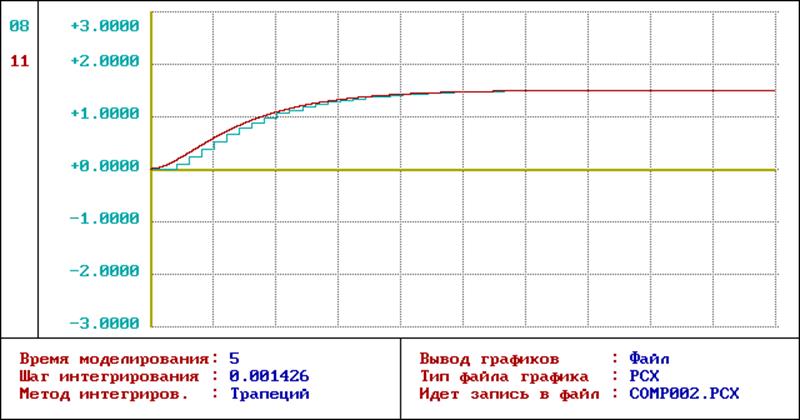
2.2. Сравнить h(t) и h(z).
3.
Моделирование звена 
3.1. Получить h(z) звена 2-ого порядка.

Звено 2-ого порядка получим из двух последовательно включённых апериодических звеньев:

![]() ; k×(1-a)=0,6
(k=1,5);
; k×(1-a)=0,6
(k=1,5);
 ; 1-b=0,154
; 1-b=0,154
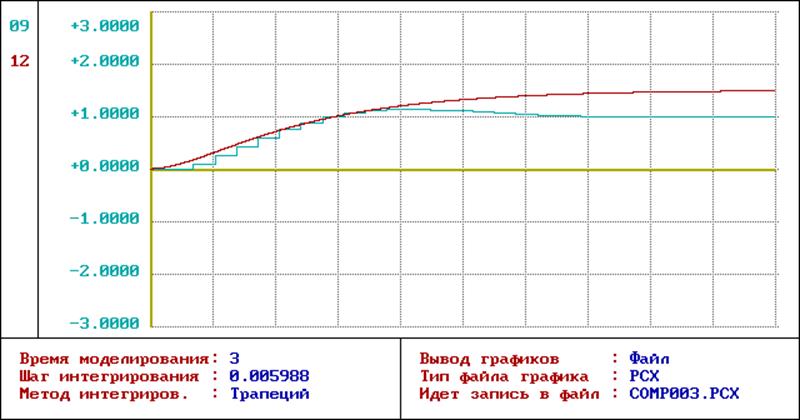
3.2. Сравнить h(t) и h(z).
4. Замыкаем обратную связь и сравниваем с двумя последовательно соединенными апериодическими звеньями с обратной связью.
Вывод:
В ходе работы мы научились заменять непрерывные системы на импульсные. Для чего делается перерасчет коэффициентов усиления и составляется другая схема. Импульсные системы точнее отрабатывают сигнал, если уменьшать шаг интегрирования. Из последнего графика видно, что время переходного процесса t=0,6 c, а ошибка ΔY=0.
Министерство образования
Российской Федерации
Новосибирский государственный
технический университет
Кафедра теории автоматического управления
Лабораторная работа №3.
Моделирование непрерывных объектов с помощью элементов сдвига.
Выполнили: Проверил:
студенты гр. КП-02 Русаков
факультета МТ Олег
Андросенко Ю.А. Петрович
Феофанов А.А.
Новосибирск,
2003 г.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.