


























|
|
||||||||||
БГТУ 02.00.ПЗ |
||||||||||
|
Изм. |
Лист |
№ докум |
Подпись |
Дата |
||||||
|
Разраб. |
Дикун |
Расчет дисковой заглаживающей машины |
Лит. |
Лист |
Листов |
|||||
|
Пров. |
Вайтехович |
1 |
||||||||
|
Консул. |
БГТУ 4170806, 2003 |
|||||||||
|
Н. Контр. |
||||||||||
|
Утв. |
Вайтехович |
|||||||||
![]() (2.5)
(2.5)
![]()
Отклонение не превышает допустимые ± 3%.
Определяем общий КПД привода
![]() (2.6)
(2.6)
где ![]() – КПД ременной передачи,
– КПД ременной передачи, ![]() ;
;
![]() – КПД планетарной передачи,
– КПД планетарной передачи, ![]() =0,97;
=0,97;
![]() – КПД пары подшипников,
– КПД пары подшипников, ![]() =0,99.
=0,99.
![]()
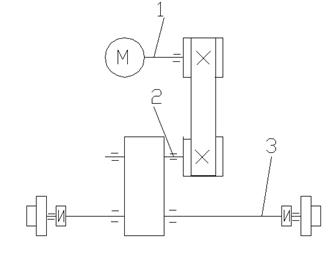
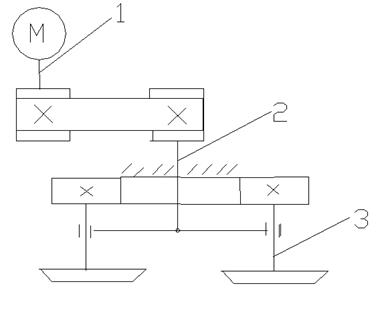 |
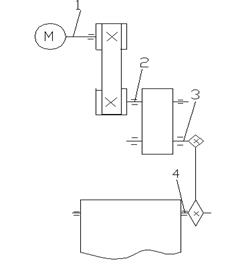
1 – вал электродвигателя; 2 –центральный шлицевой вал; 3 – вал планетарной передачи с диском.
Рис. 2.1.
Определяем потребную мощность электродвигателя NДВ, кВт по формуле
 (2.7)
(2.7)
где ηобщ – общий КПД привода.
Определяем частоту вращения валов привода
![]() , (2.8)
, (2.8)
![]()
 , (2.9)
, (2.9)
 , (2.10)
, (2.10)
Определяем мощности на валах привода
![]() , (2.11)
, (2.11)
![]()
![]() , (2.12)
, (2.12)
![]()
![]() , (2.13)
, (2.13)
![]()
Определяем угловые скорости на валах привода
![]() , (2.14)
, (2.14)
![]()
 , (2.15)
, (2.15)
 , (2.16)
, (2.16)
Определяем крутящие моменты на валах привода
 , (2.17)
, (2.17)
где i – индекс, соответствующий номеру вала.
 ;
;
 ;
;
 ;
;
2.1.2. Расчет привода перемещения портала.
Мощность, потребляемую приводом портала, определяем по формуле
![]() , (2.18)
, (2.18)
где N – мощность, кВт;
P – вес дисковой заглаживающей машины, Н;
V – скорость передвижения машины, м/мин;
По полученной мощности
подбираем электродвигатель марки 4А132М4, мощность Nдв=11
кВт; частота вращения ![]() .
.
Определяем частоту вращения колес портала
 (2.19)
(2.19)
где ![]() – частота вращения
колес портала, мин-1;
– частота вращения
колес портала, мин-1;
R – радиус шкива, м.
Угловая скорость вала колеса
 (2.20)
(2.20)
Определяем общее передаточное число привода передвижения портала
 (2.21)
(2.21)
Компонуем
кинематическую схему привода, которая представлена на рисунке 2.2. Выбираем
одноступенчатый редуктор типоразмера ЦУ – 160 – 4 – 23У2 ГОСТ 21426-75 с ![]() . Принимаем
. Принимаем ![]() ,
, ![]() .
.
![]() (2.22)
(2.22)
![]()
Кинематическая схема привода передвижения портала
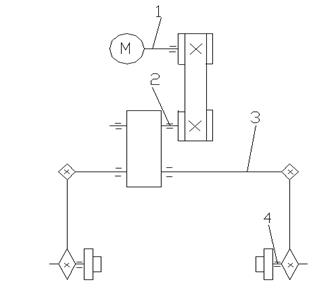 |
Рис. 2.2.
Определяем общий КПД привода
![]() (2.23)
(2.23)
где ![]() – КПД ременной передачи,
– КПД ременной передачи, ![]() ;
;
![]() – КПД пары подшипников,
– КПД пары подшипников, ![]() ;
;
![]() – КПД редуктора,
– КПД редуктора, ![]() ;
;
![]() – КПД цепной передачи,
– КПД цепной передачи, ![]() .
.
![]()
Определяем потребную мощность
 , (2.24)
, (2.24)
Определяем частоту вращения валов привода
![]() , (2.25)
, (2.25)
![]()
, (2.26)
 , (2.27)
, (2.27)
 , (2.28)
, (2.28)
Определяем мощности на валах привода
![]() , (2.29)
, (2.29)
![]()
![]() , (2.30)
, (2.30)
![]()
![]() , (2.31)
, (2.31)
![]()
![]() , (2.32)
, (2.32)
![]()
Определяем угловые скорости на валах привода
 , (2.33)
, (2.33)
, (2.34)
 , (2.35)
, (2.35)
 , (2.36)
, (2.36)
Определяем крутящие моменты на валах привода
, (2.37)
где i – индекс, соответствующий номеру вала.
 ;
;
 ;
;
 ;
;
 .
.
2.1.3. Расчет привода перемещения заглаживающего диска.
Определяем мощность, необходимую для перемещения заглаживающего диска
![]() , (2.38)
, (2.38)
где N – мощность, кВт;
P – вес, Н;
V – скорость передвижения каретки, V=6,93 м/мин.
![]() , (2.39)
, (2.39)
где Р1 – вес узла заглаживающего диска с кареткой, Р1=4500 Н;
Р2 – сила давления диска на бетонную поверхность, Р2=1000 Н;
![]() – коэффициент трения,
– коэффициент трения, ![]() =0,7.
=0,7.

По полученной мощности
подбираем электродвигатель марки 4А80А6У3, мощность Nдв=0,75
кВт; частота вращения ![]() .
.
Частота вращения выходного вала ![]() =0,33 с-1.
=0,33 с-1.
Определяем общее передаточное число привода передвижения каретки
 (2.40)
(2.40)
Компануем
кинематическую схему привода, которая представлена на рисунке 2.3. Выбираем одноступенчатый
редуктор типоразмера ЦУ – 160 – 4 – 12У2 ГОСТ 21426-75 с ![]() . Принимаем
. Принимаем ![]() ,
, ![]() =2,9.
=2,9.
![]() (2.41)
(2.41)
![]()
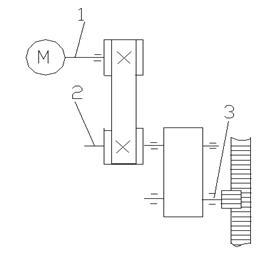 |
1 – вал электродвигателя; 2 – ведомый вал для ременной передачи и ведущий для редуктора; 3 – вал шестерни реечного зацепления.
Рис. 2.3.
Определяем общий КПД привода
![]() (2.42)
(2.42)
где ![]() – КПД ременной передачи,
– КПД ременной передачи, ![]() ;
;
![]() – КПД пары подшипников,
– КПД пары подшипников, ![]() ;
;
![]() – КПД редуктора,
– КПД редуктора, ![]() ;
;
![]() – КПД реечного зацепления,
– КПД реечного зацепления, ![]() .
.
![]()
Определяем потребную мощность
, (2.43)
Определяем частоту вращения валов привода
![]() , (2.44)
, (2.44)
![]()
 , (2.45)
, (2.45)
, (2.46)
 , (2.47)
, (2.47)
Определяем мощности на валах привода
![]() , (2.48)
, (2.48)
![]()
![]() , (2.49)
, (2.49)
![]()
![]() , (2.50)
, (2.50)
![]()
![]() , (2.51)
, (2.51)
![]()
Определяем угловые скорости на валах привода
, (2.52)
, (2.53)
, (2.54)
 , (2.55)
, (2.55)
Определяем крутящие моменты на валах привода
, (2.56)
где i – индекс, соответствующий номеру вала.
 ;
;
 ;
;
 ;
;
 .
.
2.1.4. Расчет привода перемещения бункера.
Мощность, потребляемую приводом перемещения бункера, определяем по формуле
![]() , (2.57)
, (2.57)
где N – мощность, кВт;
P – вес каретки с бункером, Н;
V – скорость передвижения каретки, м/мин;
По полученной мощности
подбираем электродвигатель марки 90L6, мощность Nдв=1,5 кВт; частота вращения ![]() .
.
Частота
вращения выходного вала ![]() =0,27 с-1.
=0,27 с-1.
Определяем общее передаточное число привода передвижения портала
(2.58)
Компонуем
кинематическую схему привода, которая представлена на рисунке 2.4. Выбираем
двухступенчатый редуктор типоразмера Ц2У – 125 – 16 – 12КУ2 ГОСТ 16162 – 78, с ![]() . Принимаем
. Принимаем ![]() .
.
![]() (2.59)
(2.59)
![]()
Отклонение составляет 2%, что не превышает допустимые 3%.
Определяем общий КПД привода
![]() (2.60)
(2.60)
где ![]() – КПД ременной передачи,
– КПД ременной передачи, ![]() ;
;
![]() – КПД пары подшипников,
– КПД пары подшипников, ![]() ;
;
![]() – КПД редуктора,
– КПД редуктора, ![]() ;
;
![]() – КПД муфты,
– КПД муфты, ![]() .
.
![]()
 |
1 – вал электродвигателя; 2 – ведомый вал для ременной передачи и быстроходный вал редуктора; 3 – тихоходный вал редуктора.
Рис. 2.4.
Определяем потребную мощность
, (2.61)
Определяем частоту вращения валов привода
![]() , (2.62)
, (2.62)
![]()
, (2.63)
, (2.64)
Определяем мощности на валах привода
![]() , (2.65)
, (2.65)
![]()
![]() , (2.66)
, (2.66)
![]()
![]() , (2.67)
, (2.67)
![]()
Определяем угловые скорости на валах привода
, (2.68)
, (2.69)
, (2.70)
Определяем крутящие моменты на валах привода по формуле (2.56)
 ;
;
 ;
;
 ;
;
2.1.5. Расчет привода ленты питателя.
Определяем мощность, необходимую для перемещения транспортерной ленты
![]() , (2.71)
, (2.71)
где N – мощность, кВт;
P – тяговое усилие, P=6000 Н;
V – скорость движения ленты питателя, V=5,91 м/мин.
По полученной мощности
подбираем электродвигатель марки 4А80А6У3, мощность Nдв=0,75
кВт; частота вращения ![]() .
.
Частота вращения выходного вала ![]() =0,14 с-1.
=0,14 с-1.
Определяем общее передаточное число привода ленты питателя
(2.72)
Компонуем
кинематическую схему привода, которая представлена на рисунке 2.5. Выбираем
одноступенчатый редуктор типоразмера ЦУ – 160 – 4 – 12У2 ГОСТ 21426-75 с ![]() =4. Принимаем
=4. Принимаем ![]() =4,5,
=4,5, ![]() =6.
=6.
![]() (2.73)
(2.73)
![]()
Отклонение составляет 2%, что не превышает допустимые 3%.
 |
1 – вал электродвигателя; 2 – ведомый вал для ременной передачи и ведущий для редуктора; 3 – ведомый вал редуктора и ведущий вал цепной передачи; 4 – ведомый вал цепной передачи.
Рис. 2.5.
Определяем общий КПД привода
![]() (2.74)
(2.74)
где ![]() – КПД ременной передачи,
– КПД ременной передачи, ![]() ;
;
![]() – КПД пары подшипников,
– КПД пары подшипников, ![]() =0,99;
=0,99;
![]() – КПД редуктора,
– КПД редуктора, ![]() ;
;
![]() – КПД цепной передачи,
– КПД цепной передачи, ![]() =0,95.
=0,95.
![]()
Определяем потребную мощность по формуле
,
Определяем частоту вращения валов привода
![]() , (2.75)
, (2.75)
![]()
, (2.76)
, (2.77)
 , (2.78)
, (2.78)
Определяем мощности на валах привода
![]() , (2.79)
, (2.79)
![]()
![]() , (2.80)
, (2.80)
![]()
![]() , (2.81)
, (2.81)
![]()
![]() , (2.82)
, (2.82)
![]()
Определяем угловые скорости на валах привода
, (2.83)
, (2.84)
, (2.85)
 , (2.86)
, (2.86)
Определяем крутящие моменты на валах привода по формуле (2.56)
 ;
;
 ;
;
 ;
;
 .
.
2.1.6. Расчет привода вращения заглаживающего вала.
Мощность, потребляемую приводом рабочего органа, определяем по формуле
![]() , (2.87)
, (2.87)
где РТР – момент трения, Н.м;
fТР – коэффициент трения. Принимаем для материала диска сталь Ст.3 fТР=0,7;
ΔР – относительное давление. ΔР=800–1000 Па;
L – длина вала. L=3000 мм;
D – диаметр вала. D=140мм;
а – величина углубления, мм;
VВ – линейная скорость вала. VВ=14,3 м/с;
kВ – коэффициент, учитывающий сопротивление волны бетонной смеси, kВ=1,1.
 .
.
По полученной мощности подбираем 2 электродвигателя марки 4А132М
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.