




Устойчивость [L1] механического движения
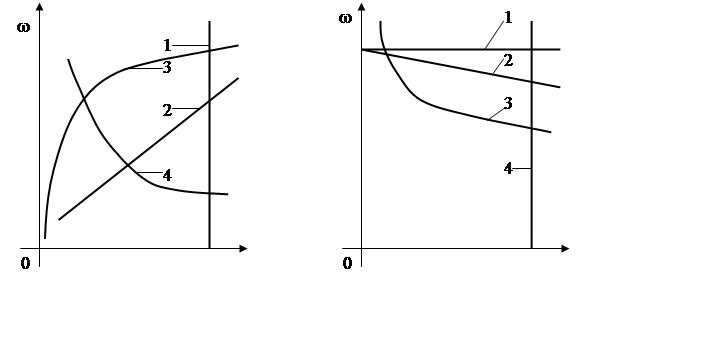
При рассмотрении типовых статических нагрузок от механизмов, действующих в электроприводе, были установлены их характерные зависимости, общий вид которых приведен на рис. ,а. Здесь 1– механическая характеристика, не зависящая от скорости, 2 – линейно-возрастающая характеристика, 3 – нелинейно-возрастающая (параболическая) характеристика, 4 – нелинейно-спадающая характеристика.


а) б)
Рис.
В силу того, что двигатель является источником механической энергии для механизма, то для выполнения режимов работы механизма целесообразно иметь достаточно полное соответствие механических характеристик двигателя механическим характеристикам механизма. Типы механических характеристик двигателя представлены на рис. ,б. Здесь 1– абсолютно жесткая характеристика, 2 – жесткая механическая характеристика, 3 – мягкая характеристика. 4 – абсолютно мягкая характеристика. Они обладают одним общим свойством – скорость есть убывающая функция момента. Для оценки этого свойства вводится понятие модуля жесткости статической механической характеристики β = dM/dω. Чем больше модуль жесткости характеристик, тем более стабильнее скорость электропривода при широких изменениях его нагрузки, и наоборот. Модуль жесткости применим для оценки как линейных, так и нелинейных характеристик. Линейные характеристики обладают постоянным значением модуля жесткости. На рабочих участках механических характеристик двигателей модуль жесткости имеет отрицательное значение. Если значение модуля жесткости равно бесконечности, то такая характеристика называется абсолютно жесткой. В этом случае как бы ни изменялся момент двигателя, его скорость остается постоянной (кривая 1). Такую характеристику имеют синхронные машины, шаговые двигатели. Если при широком изменении момента скорость двигателя изменяется в пределах 1…10%, то механическая характеристика называется жесткой (кривая 2). Примером может служить механическая характеристика двигателя постоянного тока независимого возбуждения, а также рабочая часть механической характеристики асинхронного двигателя (s < sкр). В этом случае, когда модуль жесткости приобретает малые значения, т. е. с изменением момента существенно изменяется и скорость двигателя, механические характеристики называются мягкими. Такая характеристика присуща двигателю постоянного тока последовательного возбуждения, при чем модуль жесткости не имеет постоянного значения во всех точках характеристики (кривая 3). Если модуль жесткости равен нулю, то имеется абсолютно мягкая характеристика (кривая 4), как бы не изменялась скорость момент двигателя остается постоянным. Такого вида характеристика формируется двигателем постоянного тока независимого возбуждения при питании его от источника тока.
В установившемся режиме работы электропривода как сложной электромеханической системы имеет место равновесие момента нагрузки и электромагнитного момента двигателя, и это происходит при определенной скорости. При изменении статической нагрузки на валу двигателя его скорость и момент, который он развивает, могут автоматически измениться и снова устойчиво работать при другой скорости с новым значением моментом. Эту роль автоматического регулятора в электрической машине может выполнять ее ЭДС, что наглядно видно из уравнения электрического равновесия – приложенное к обмоткам двигателя напряжение уравновешивается возникшей в процессе его работы ЭДС и падением напряжения от тока протекающего по обмоткам двигателя. Для выяснения сущности этого процесса следует рассмотреть вопрос об устойчивости движения электропривода. Различают статическую и динамическую устойчивость. Статическая устойчивость характеризует работу электропривода, когда скорость и момент изменяются во времени относительно медленно. Динамическая устойчивость оценивает работу электропривода в переходных процессах.
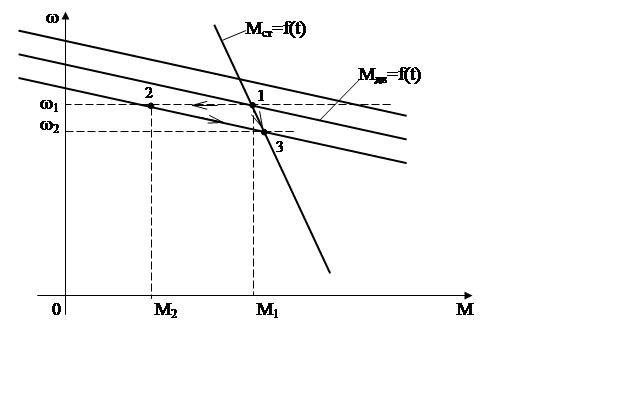
Под статической устойчивостью понимается способность электропривода автоматически восстанавливать установившийся режим работы после его нарушения без помощи регуляторов, лишь вследствие свойств электропривода, обусловленных механическими характеристиками двигателя и механизма. Рассмотрим это на примере характеристик, приведенных на рис. , и выведем критерий устойчивости. В точке 1 пересечения характеристик имеем установившийся режим (момент двигателя равен моменту статической нагрузки М=Мст). Допустим, что по внешним причинам механическая характеристика двигателя сместилась вниз с небольшим изменением. Таким образом, при прежней скорости ω1 и прежнем статическом моменте момент двигателя уменьшился: М1 > М2 и Мст > М1 – М2 . Под действием появившейся недостаточности момента двигателя возникает замедление электропривода, что приведет к изменению момента двигателя по его характеристики , а изменение момента механизма по его. Этот процесс закончится, когда характеристики не пересекутся в новой точке (точка 2). В этой точке возникнет новое равновесие, но уже при новом значении скорости ω2.
Поскольку одной из основных показателей механических характеристик является модуль жесткости, то он по своей структуре подходит для формирования критерия устойчивости работы электропривода. Для рассматриваемого примера условие устойчивости запишется βдв – βст < 0. Это соотношение и следует принять критерием устойчивости работы электропривода. Приведенные рассуждения справедливы и для случая, когда механическая характеристика двигателя немного сместилась вверх от основной, или когда механическая характеристика механизма расположится слева или справа от характеристики Мст =f(ω).
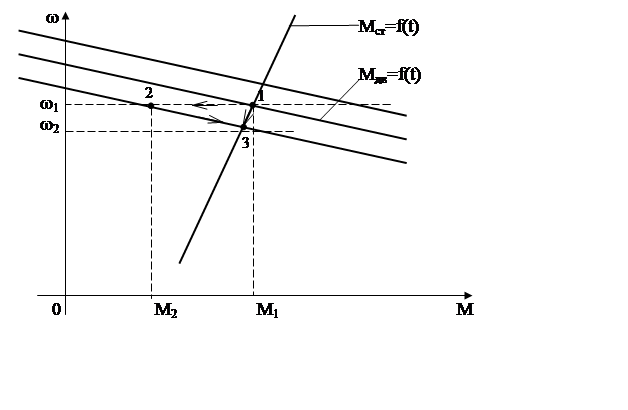
Разберем случай расположения характеристик двигателя и механизма, представленных на рис. . Здесь установившийся режим работы находится в точке 1. В силу процессов регулирования механическая характеристика двигателя сместилась вверх. Тогда при той же скорости и том же моменте нагрузки момент двигателя уменьшится (точка 2) и возникшая недостаточность момента (Мдв – Мст < 0) приведет к уменьшению скорости (движение к точке 3), в результате чего возрастет момент статической нагрузки (М3). Это приведет к увеличению указанной недостаточности момента, к еще большему уменьшению скорости и т. д. (стрелками показано направление изменения параметров). Процесс уменьшения скорости будет продолжаться до полной остановки двигателя. Следовательно, при таком расположении механических характеристик система статически неустойчива. Для данного случая критерий устойчивости работы электропривода примет вид βдв – βст > 0.
При проектировании электропривода механическая характеристика производственного механизма является заданной. Поэтому получение устойчивой работы в установившемся режиме для определенных скоростей и статических моментов механизма необходимо подбирать механическую характеристику электропривода или формировать ее различными схемными решениями и аппаратными средствами. При анализе статической устойчивости электропривода рассматриваются только его начальное и конечное состояние на основании статических характеристик двигателя и механизма. Динамические моменты, время перехода от начального состояния к конечному, не учитывались, не рассматривался и характер движения электропривода в течение этого процесса. Учет перечисленных факторов является сущностью исследования динамической устойчивости и этим в большей мере занимается теория автоматического управления.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
[L1]
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.