Механические переходные процессы
Изменение управляющего воздействия (т. е. электромагнитного момента, развиваемого двигателем) или возмущающего воздействия (т. е. момента статического сопротивления механизма) вызывают в механической части электропривода переходные процессы. Во время этих переходных процессов скорости движения связанных между собой масс изменяются от начальных значений к установившимся значениям, заданным новыми воздействиями на систему. В качестве примера рассмотрим переходные процессы в механической части одномассовой электромеханической системы.
Допустим, что ωнач = 0 и к ротору двигателя в момент времени t=0 прикладывается электромагнитный момент (управляющее воздействие), который изменяется по экспоненциальному закону с постоянной времени Т.
![]()
Уравнение движения относительно производной скорости выглядит следующим образом
dω =ε .dt, где  – это
ускорение масс механической части электропривода. Интегрирование этого
выражения при данном законе изменения момента двигателя (движущего момента)
дает следующее
– это
ускорение масс механической части электропривода. Интегрирование этого
выражения при данном законе изменения момента двигателя (движущего момента)
дает следующее
 , и в конечном счете получим
выражение изменения скорости в переходном процессе
, и в конечном счете получим
выражение изменения скорости в переходном процессе
![]() , где
, где  – начальное ускорение, Мнач = Мстт+
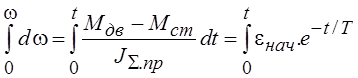
ΔМ – начальный момент двигателя. Характеристики, соответствующие этим
рассуждениям приведены на рис. . Угловая скорсть механической части
увеличивается по экспоненциальному закону от нуля до ωуст =εнач .Т. При этом
ускорение механической части уменьшается по мере увеличения скорости в связи с
тем, что уменьшается (Мдв – Мдв). Время переходного
процесса теоретически бесконечно, а практически его считают законченным через (3…4)Т,
что законно в соответствии со свойствами экспоненты.
– начальное ускорение, Мнач = Мстт+
ΔМ – начальный момент двигателя. Характеристики, соответствующие этим
рассуждениям приведены на рис. . Угловая скорсть механической части
увеличивается по экспоненциальному закону от нуля до ωуст =εнач .Т. При этом
ускорение механической части уменьшается по мере увеличения скорости в связи с
тем, что уменьшается (Мдв – Мдв). Время переходного
процесса теоретически бесконечно, а практически его считают законченным через (3…4)Т,
что законно в соответствии со свойствами экспоненты.
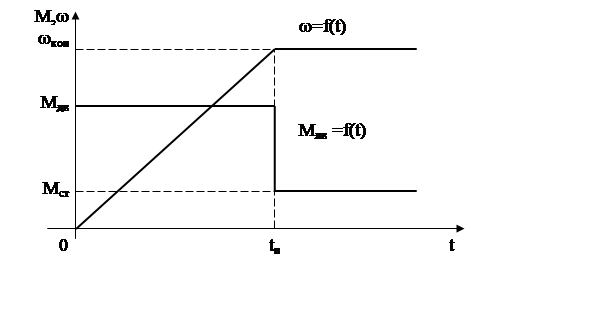
Во время переходного процесса момент двигателях за счет средств управления может поддерживаться постоянным и момент статический механизма также неизменен. Интегрирование уравнения движения для этого случая проводится по следующему выражению
 , в результате чего получается
формула равномерного ускоренного движения
, в результате чего получается
формула равномерного ускоренного движения
![]() .
.
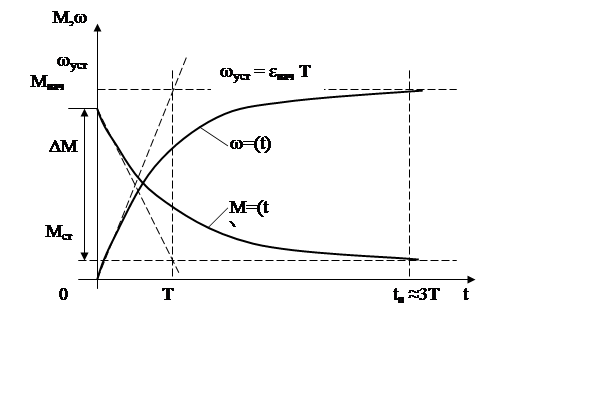
Рис.
Отсюда время переходного процесса определиться
 .
.
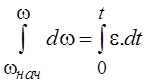
Графически этот случай представлен на рис. .
![]()
![]()
Рис.
Здесь в точке (0, ωнач =0) имеет место состояния покоя механической части электропривода. В момент t=0 происходит скачкообразное задание момента двигателя Мдв и привод переходит в режим равномерного ускоренного движения с ускорением
 .
.
Если управляющее воздействие, т. е. момент двигателя оставить неизменным, то процесс увеличения скорости будет неограниченным. На практике при достижении необходимого значения скорости ωкон осуществляют снижение момента двигателя до значения Мдв = Мст, ускорение скачком уменьшается до нуля и наступает установившийся режим ω=ωкон. Рассмотренные случаи относятся к электропривода, в котором действует реактивный момент статического сопротивления.
Допустим, что одномассовая система нагружена
активным моментом сопротивления и работает в установившемся режиме при Мдв
= Мст с постоянной скоростью ω > 0 = const. Если в момент t=0 уменьшить
момент двигателя до нуля, то под действием момента Мст электропривод
будет замедляться. При этом замедлении  скорость
будет изменяться по следующему закону
скорость
будет изменяться по следующему закону  .
Через время
.
Через время ![]() скорость двигателя станет равной
нулю, однако момент сопротивления активный и он сохраняет свое действие.
Двигатель под действием этого момента начнет ускоряться, но уже в
противоположном направлении с возрастающей по абсолютному значению скоростью,
рис. .
скорость двигателя станет равной
нулю, однако момент сопротивления активный и он сохраняет свое действие.
Двигатель под действием этого момента начнет ускоряться, но уже в
противоположном направлении с возрастающей по абсолютному значению скоростью,
рис. .
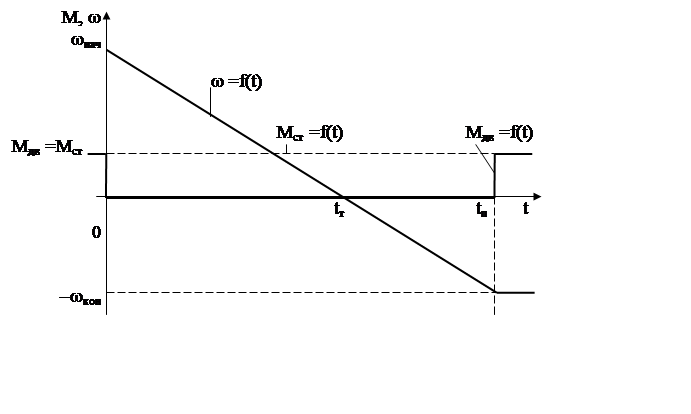
Рис.
Если не производить никаких изменений в работе системы, то скорость увеличится до недопустимых по механической прочности двигателя знвчений. Поэтому отключение двигателя, работающего с активным моментом, а это в подавляющем числе грузоподъемные мезанизмы (например, стапелеподъемники, механизм привода ножа резальных машин), сопряжено с опасностью самопроизвольного движения. Поэтому эти механизмы оснащаются механическими тормозами, которые автоматически затормаживают привод механизма при отключения двигателя от источника питания.
Одним из вариантов переходных процессов является реверсирование, рис. .
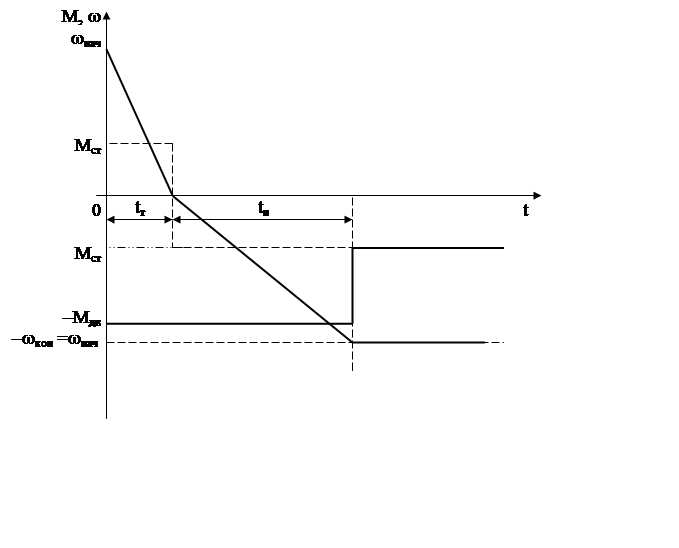
Рис.
Реверсирование – это изменение направления вращения вала двигателя. При реактивном моменте статического сопротивления изменение скорости от ωнач до –ωкон происходит под действием управляющего воздействия, которое в момент времени скачком меняет свой знак и значение с Мдв =Мст до
Мдв = – Мдв.1 > Мст. Под действием управляющего воздействия происходит замедление движения рассматриваемой одномассовой системы по закону
 .
.
На процесс торможения, т. е. на снижение скорости до нуля затрачивается время равное
 .
.
По истечении времени торможения скорость двигателя под действием момента Мдв = – Мдв.1 изменит свой знак, а это изменит направление реактивного момента на противоположное. Как следствие скачком уменьшается по абсолютному значению ускорение
 .
.
Соответственно при разгоне в обратном направлении скорость изменяется по следующему закону
 .
.
Время разгона до скорости ωкон = – ωнач составит
 .
.
Для перехода к установившемуся режиму при скорости ωкон = – ωнач момент двигателя должен скачком уменьшиться до значения Мдв.1= – Мст. Рассмотренные примеры переходных процессов при постоянном значении статического момента сопротивления показывают, что изменение скорости электропривода определяется управляющим воздействием, т. е. изменением во времени момента, развиваемого двигателем. Следовательно, формирование требуемых законов движения электропривода обеспечивается формированием соответствующих законов изменения во времени электромагнитного момента двигателя.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.