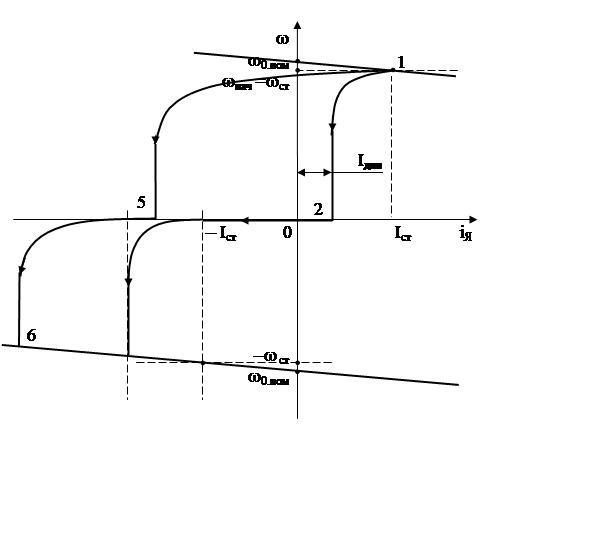
В случае механизма с реактивным моментом статического сопротивления процесс реверса протекает несколько сложнее. Рассмотрим этот процесс на конкретном электроприводе – на электроприводе с двигателем постоянного тока с двигателем независимого возбуждения. Соответствующие механические характеристики приведены на рис. .
![]()
![]()
Рис.
Здесь процесс замедления аналогичен процессу торможения в случае работы электропривода с активной нагрузкой. Начальная разность между напряжением на якоре uЯ и ЭДС двигателя Едв =сωст, равная падению напряжения на сопротивлении якоря от статического тока Iст.RЯ.Σ, уменьшается до значения, равного падению напряжения от установившегося тока при реверсе Iр.уст= Iдин= Мдин/с. Ток якоря при этом уменьшается от начального значения Iст до Iр.уст, а затем он остается постоянным до скорости, равной нулю. Зависимости ЭДС еЯ(t) и тока двигателя iЯ(t) приведены на рис. .
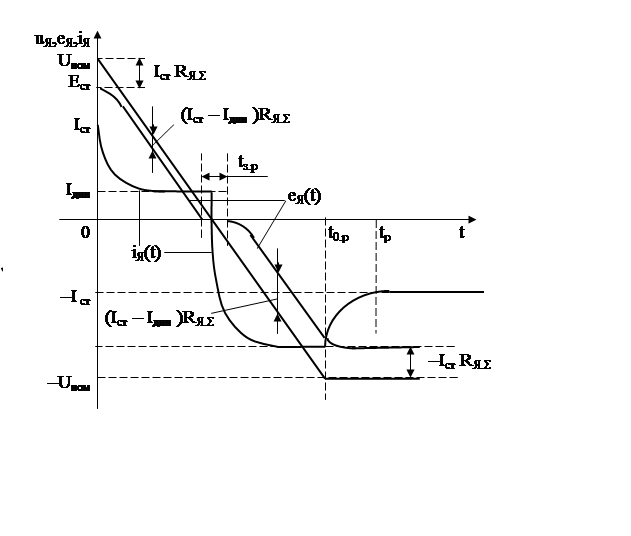
Рис.
В момент прохождения скорости через нуль реактивный момент нагрузки изменяется скачком от Мст до – Мст. Поэтому для разгона двигателя в противоположном направлении ток должен поменять знак за счет изменения знака управляющего воздействия, а затем увеличиваться по модулю до значения, превышающему модуль статического тока. Так появляется пауза в движении tз.р, в течение которой ток якоря нарастает по закону
iЯ =Iдин – с.ε0.t/RЯ.Σ , а скорость ω=0. Из приведенного выражения определяется время запаздывания в момент iЯ = – Iст: tз.р= (Iдин + Iст).RЯ.Σ / с.ε0.t. В дальнейшем разгон в противоположном направлении описывается аналогичными уравнениями предыдущего случая. Динамическая электромеханическая характеристика процесса реверсирования электропривода с реактивным моментом нагрузки приведена на рис. , кривая 1-2-3-4.
Если увеличить темп изменения управляющего воздействия duЯ /dt, то вследствие роста динамического тока при торможении ток (Iст–Iдин) уменьшается до нуля, а потом изменяет знак, при этом время запаздывания уменьшается. При Iст = – Iдин это время становится равным нулю, при этом из уравнения движения (– Мдв – Мст = JΣ.пр.ε0 ) можно определить значение ε0.1:
ε0.1 = – 2Мст / JΣ.пр = – 2Мст / β.Тм.
Если |ε0.1| > |ε0.1|, то процесс изменения скорости при реверсе является непрерывным и влияние реактивного момента нагрузки сказывается лишь на изменении скачкам ускорения при переходе скорости через нуль. Динамическая электромеханическая характеристика процесса реверсирования электропривода для этого случая приведена на рис. , кривая 1-5-6-4.
Рассмотренные переходные процессы позволяют сделать общий вывод о том, что закон изменения напряжения uЯ для электропривода постоянного тока или частоты fs для электропривода переменного тока определяет характер изменения скорости в переходном процессе с тем большей точностью, чем меньше электромеханическая постоянная времени Тм = JΣ.пр / β. Этот вывод действителен и для любого другого закона изменения управляющего воздействия.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.