Зависимости ω=f(t) и Мдв=f(t) соответствующие второму этапу переходного процесса приведены на рис. . Второй этап заканчивается в момент времени t0 (точка 2), когда управляющее воздействие достигает требуемого значения для создания естественной или искусственной характеристик и его дальнейший рост прекращается. Двигатель выходит на соответствующую характеристику при соответствующих конечных условиях второго этапа (ωдв, Мдв), которые являются начальными для третьего этапа. Момент двигателя равен динамическому моменту в конце второго этапа переходного процесса, определяемому расчетом. Значение скорости определяется, исходя из предположения, что при линейности механических характеристик, можно воспользоваться методом подобия треугольников.
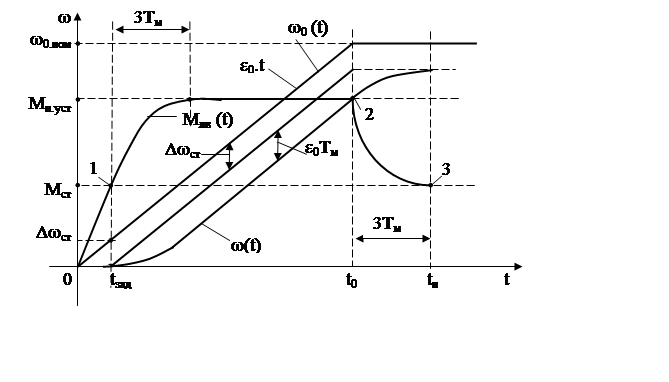
Рис.
Переходный процесс на третьем этапе представляет движение по статической характеристике (из точки 2 в точку 3), определяемой конечным значением задающего воздействия. Это движение описывается следующими выражениями
![]()
![]() .
.
Общее время переходного процесса составляет tп = t0 + 3Тм. Обычно Т<< t0, поэтому время переходного процесса определяется временем нарастания управляющего воздействия (напряжения на якоре двигателя или частоты тока статора двигателя) до установившегося значения, т. е. tп ≈ t0.
Рассмотрим переходный процесс электропривода с
активным моментом статического сопротивления. Поскольку процесс пуска
аналогичен предыдущему случаю, рассмотрим процесс торможения с последующим
изменением направления вращения, т. е. реверс электропривода. Как тот, так и
другой процессы проходят при плавном изменении задающего воздействия по
закону ![]() , где оно изменяется от ω0.нач=ω0.ном
до ω0.кон = – ω0.ном. Рассматриваемый процесс описывается
следующими выражениями
, где оно изменяется от ω0.нач=ω0.ном
до ω0.кон = – ω0.ном. Рассматриваемый процесс описывается
следующими выражениями
![]() ,
,
![]() .
.
Механические характеристики, отражающие этот процесс, представлены на рис. . Изменения скорости и момента, рассчитанные по приведенным выше формулам, представлены на рис. . Сам процесс реверса распадается на три этапа. На первом этапе идет торможение электропривода с определенным динамическим моментом до скорости равной нулю (точка 2). На втором этапе происходит разгон электропривода под действием управляющего воздействия, которое поменяло свой знак на противоположный. Так как во всем этом процессе ускорение отрицательное, отрицателен и динамический момент JΣ.пр.ε0, то суммарный момент двигателя Мдин при реверсе определяется как разность Мст – β.Тм.ε0.
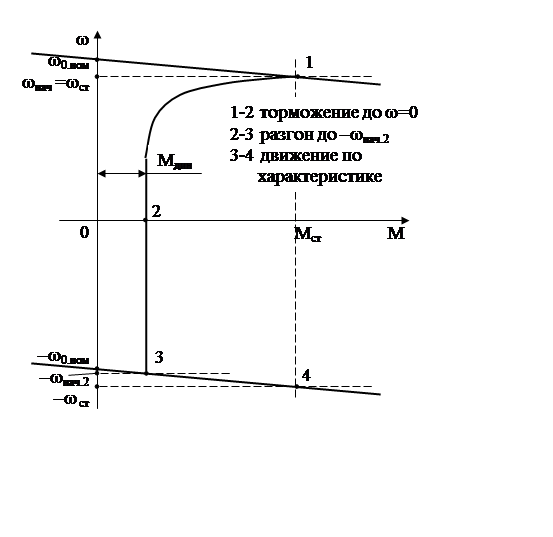
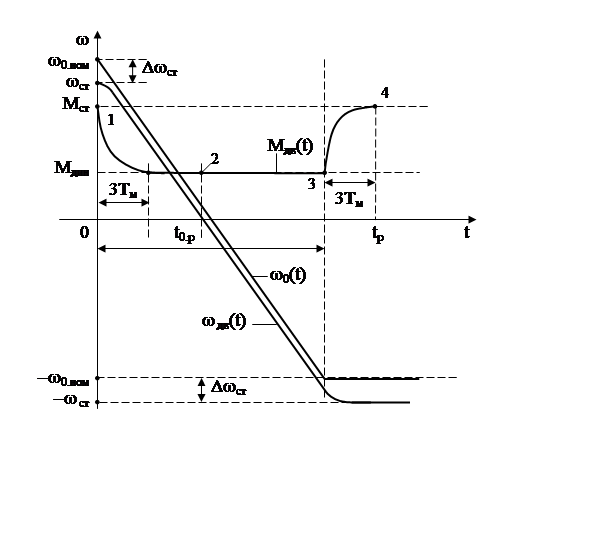 Рис.
Рис.
Рис.
Таким образом, ошибка, с которой скорость ω следует за изменением ω0, уменьшается: ΔωΣ =Δωст – Тм.ε0. Она в зависимости от соотношений ωст, Тм и ε0 ошибка может быть равной нулю (Δωст = Тм.ε0) или получить отрицательный знак(Δωст < Тм.ε0). При этом и момент двигателя Мдин также становится равным нулю или изменяет знак на отрицательный. Если ΔωΣ >0 (Мст >|JΣ.пр.ε0|), то двигатель в процессе снижения скорости работает в двигательном режиме, а при изменении знака скорости на отрицательный переходит в тормозной режим с тем же моментом Мдв = Мдин. Если ΔωΣ<0 (Мст<|JΣ.пр.ε0|), то двигатель в процессе снижения скорости работает в тормозном режиме, а при изменении знака скорости на отрицательный переходит в двигательный режим. Значение момента двигателя Мдв = Мдин= Мст – JΣ.пр.ε0= Мст – β.Тм.ε0 определяет при t = t0.р в конце процесса нарастания ω0 до значения – ω0.ном начальное значение скорости Δωнач.2 (точка 3) для заключительного второго этапа реверса. Заключительный этап реверса – это движение по механической характеристике из тоски 3 в точку 4, описывающееся ранее приведенными уравнениями.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.