


ТАУ 23-1. Синтез дискретного регулятора из условия минимизации дисперсии выходного сигнала
Объект линейный, без запаздывания, записанный в виде передаточной функции.
 |
![]()
g y u y
--
Чтобы
регулятор уменьшал воздействие ![]() , принимаем входной
сигнал равным нулю, используя то, что эта система линейна.
, принимаем входной
сигнал равным нулю, используя то, что эта система линейна. ![]() можно математически представить как
результат прохождения какого-либо шума (белого) через фильтр. Привяжемся к
характеристикам белого шума: M{V(R)}=0;
можно математически представить как
результат прохождения какого-либо шума (белого) через фильтр. Привяжемся к
характеристикам белого шума: M{V(R)}=0;
 . На основе фильтра можно получить
необходимый сигнал
. На основе фильтра можно получить
необходимый сигнал ![]() . Зададимся формой W:
. Зададимся формой W:


В области Z-преобразований можно записать связь сигнала на выходе системы, регулятора, фильтра и т.д. Обозначим критерий, с помощью которого будем оценивать систему Y нормированный – математическое ожидание. y=yфактич-my. Имеем в виду, что объект инерционный.
Пусть
будет:  , r - весовой коэффициент соответствия
между y2(k+1) и u2(k).
, r - весовой коэффициент соответствия
между y2(k+1) и u2(k).
На основе этого условия
необходимо синтезировать систему. Когда есть функция и необходимо найти
экстремум, то необходимо взять производную по этой переменной и приравнять ее к
нулю. Методика основана на этом условии. Запишем сигнал относительно выхода:  , умножим на z:
, умножим на z:  ;
; ![]() (1)
(1)
Ограничимся только первыми составляющими (a, b, c, d).
![]() ;
;
![]() ;
;
 ;
;
Имеем составляющую для критерия:
ТАУ 23-2

![]() . От данного выражения
берем производную по u(k).
. От данного выражения
берем производную по u(k).
 ;
;
![]() (2)
(2)
Избавимся
от белого шума. Выразим ![]() из (1) и подставим в
(2).
из (1) и подставим в
(2).
МОД 23 Идентификация параметров передаточной функции объектов методом моделирующих функций.
Он применяется для получения динамической характеристики (ДУ объекта), подверженных случайным воздействиям, совокупность которых приводит к мат ожиданию данных воздействий = 0.
На 1-ом этапе задаются видом ДУ, отражающих свойства объекта.
ДУ n-го порядка:

![]() y - выход, x(t) -
вход, x1(t) – помеха.
y - выход, x(t) -
вход, x1(t) – помеха.
На 2-ом этапе задаемся видом моделирующей функции ![]() , которая должна быть:
, которая должна быть:
1) непрерывной и дифференцируемой
2) ограниченной на [0;t]
3) на концах интервала [0;T] ф-ция ![]()
Умножим на ![]() :
:

Проинтегрируем на интервале [0;T]:

Производим интегрирование по частям полученное выражение столько раз, чему равен порядок производной данного члена:

 - по
3-му условию
- по
3-му условию
Здесь неизвестны коэффициенты ![]() .
Необходимо составить систему из
.
Необходимо составить систему из ![]() ур-ий. Дляэтого надо
получить
ур-ий. Дляэтого надо
получить ![]() реализацию x(t) на входе и реализацию y(t) на выходе.
реализацию x(t) на входе и реализацию y(t) на выходе.
Пример вида моделирующей функции:
![]()
A(t), B(t) – врем ф-ции.
Доп условия: A(t)=1, b=T, 
Получим:  при
при  .
.
Выбор вида моделирующей функции зависит от сложности моделирующего объекта.
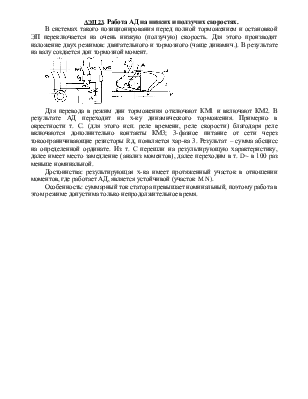
АЭП 23. Работа АД на низких и ползучих скоростях.
В системах такого позиционирования перед полной торможением и остановкой ЭП переключается на очень низкую (ползучую) скорость. Для этого производят наложение двух режимов: двигательного и тормозного (чаще динамич.). В результате на валу создается доп тормозной момент.

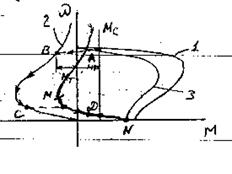
Для перевода в режим дин торможения отключают КМ1 и включают КМ2. В результате АД переходит на х-ку динамического торможения. Примерно в окрестности т. С. (для этого исп. реле времени, реле скорости) благодаря реле включаются дополнительно контакты КМ3; 3-фазное питание от сети через токоограничивающие резисторы Rд, появляется хар-ка 3. Результат – сумма абсцисс на определенной ординате. Из т. С перешли на результирующую характеристику, далее имеет место замедление (анализ моментов), далее переходим в т. D~ в 100 раз меньше номинальной.
Достоинства: результирующая х-ка имеет протяженный участок в отношении моментов, где работает АД, является устойчивой (участок M N).
Особенность: суммарный ток статора превышает номинальный, поэтому работа в этом режиме допустима только непродолжительное время.
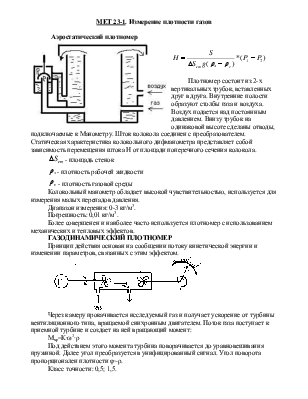
МЕТ 23-1. Измерение плотности газов
Аэростатический плотномер
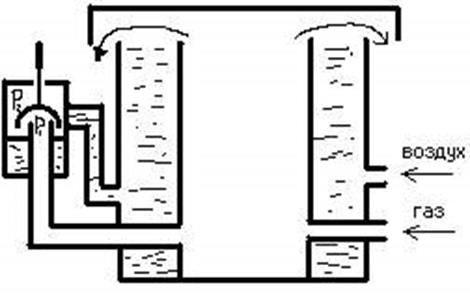
Плотномер состоит из 2-х вертикальных трубок, вставленных друг в друга. Внутренние полости образуют столбы газа и воздуха. Воздух подается над постоянным давлением. Внизу трубок на одинаковой высоте сделаны отводы, подключаемые к Манометру. Шток колокола соединен с преобразователем. Статическая характеристика колокольного дифманометра представляет собой зависимость перемещения штока Н от площади поперечного сечения колокола.
![]() - площадь стенок
- площадь стенок
![]() - плотность рабочей жидкости
- плотность рабочей жидкости
![]() - плотность газовой среды
- плотность газовой среды
Колокольный манометр обладает высокой чувствительностью, используется для измерения малых перепадов давления.
Диапазон измерения: 0-3 кг/м3.
Погрешность: 0,01 кг/м3.
Более совершенен и наиболее часто используется плотномер с использованием механических и тепловых эффектов.
ГАЗОДИНАМИЧЕСКИЙ ПЛОТНОМЕР
Принцип действия основан на сообщении потоку кинетической энергии и изменении параметров, связанных с этим эффектом.
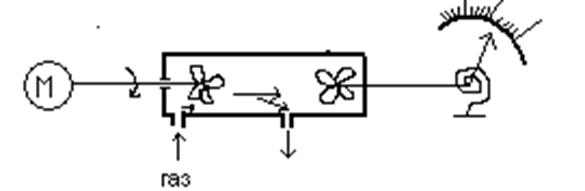
Через камеру прокачивается исследуемый газ и получает ускорение от турбины вентиляционного типа, вращаемой синхронным двигателем. Поток газа поступает к приемной турбине и создает на ней вращающий момент:
Мвр=К∙ω2∙ρ
Под действием этого момента турбина поворачивается до уравновешивания пружиной. Далее угол преобразуется в унифицированный сигнал. Угол поворота пропорционален плотности φ~ρ.
Класс точности: 0,5; 1,5.
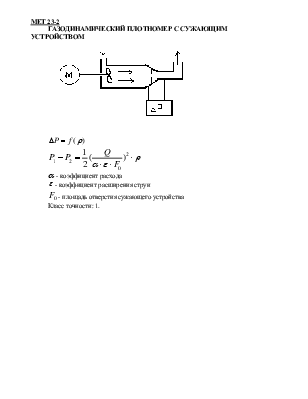
МЕТ 23-2
ГАЗОДИНАМИЧЕСКИЙ ПЛОТНОМЕР С СУЖАЮЩИМ УСТРОЙСТВОМ
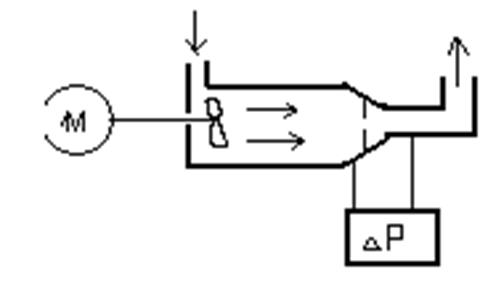
![]()
![]() - коэффициент расхода
- коэффициент расхода
![]() - коэффициент расширения струи
- коэффициент расширения струи
![]() - площадь отверстия сужающего устройства
- площадь отверстия сужающего устройства
Класс точности: 1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.