


















основе АКР лежит динамическое программирование и к этому добавляется некоторая функция, про которую считаем, что по своей форме она соответствует оптимальному значению критерия. Возьмем квадратичный интегральный критерий:
где D и C - весовые коэффициенты матрицы, которые определяют вес переменных относительно других. Для коэффициентов можно придать различный вес. Этот выбор остается за самим проектировщиком. Матрицы D и C были выбраны в шестой главе.
Оптимальное управление:
![]() , где
, где ![]() -
матрица коэффициентов обратной связи по переменным x.
-
матрица коэффициентов обратной связи по переменным x.
[k,s,e]=lqr(A,B,D,C)
k= 0.7583 0.0364 0.0066 0.2053 0.9707 0.0026 0.0006
Если в формулу для Uопт подставить, полученное ранее выражение для L, то получим:
![]()
![]() ;
;
Значения матрицы l являются коэффициентами обратной связи по возмущению:
l = 0.2017 0 0 0 0 0 0
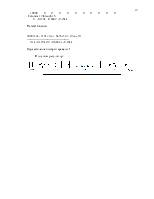
Промоделируем нашу систему с учетом АКР-регулятора.
При построении оптимальной системы необходимо учесть, что разделять запаздывание на части и отделять его от объекта на практике не возможно. Для решения этой проблемы необходимо использовать дифференциаторы (реальные).
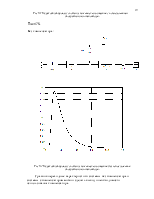
Учитывая эти моменты модель реальной оптимальной системы можно представить в следующем виде:
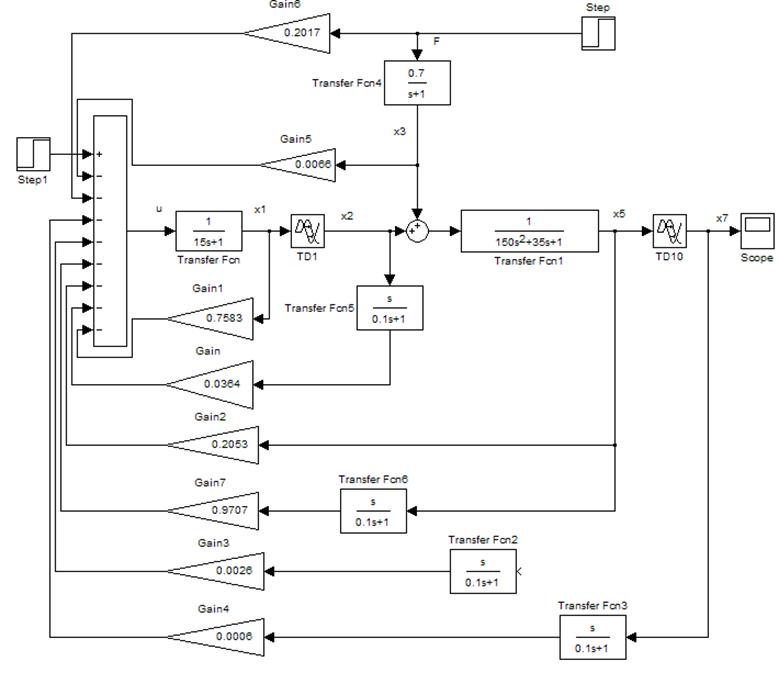
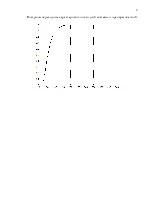
График переходного процесса будет следующим:
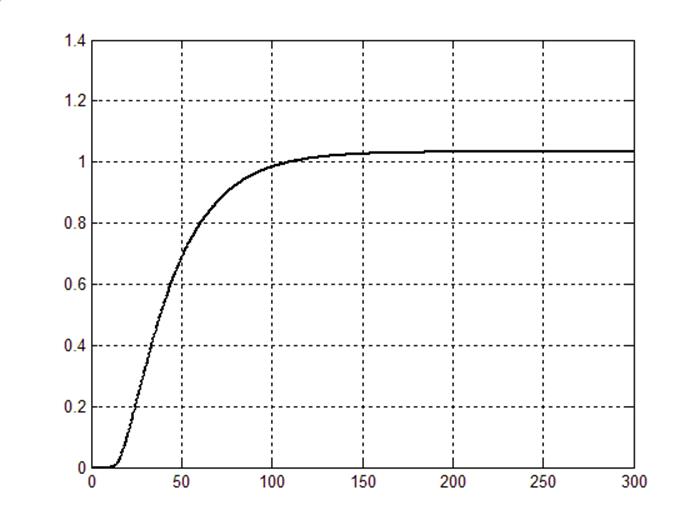
Рис 7.1 Переходный процесс АКР-регулятора.
Tпп=184.
Таким образом можно сделать вывод о том, что не имеет смысла строить систему на основе АКР- регулятора, так как система не выходит на единицу.
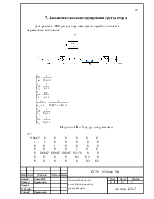
8. Синтез дискретного регулятора с ограничением по управлению.
Необходимо синтезировать регулятор с управлением U=0.1∙U0 (U0 - первоначальное управление и равно значению q0 для дискретного регулятора без ограничения по управлению).
Если увеличить время установления на один такт с ![]() до
до ![]() , то
можно заранее определить начальное значение управляющей переменной
, то
можно заранее определить начальное значение управляющей переменной ![]() . Поскольку этот сигнал обычно имеет
максимальную величину, его можно ограничить, задав допустимое значение
. Поскольку этот сигнал обычно имеет
максимальную величину, его можно ограничить, задав допустимое значение ![]() при синтезе регулятора.
при синтезе регулятора.
Добавим еще один член в многочлены ![]() и
и ![]() :
:
![]() ,
,
![]() ,
,
 .
.
Это равенство справедливо только в том случае, когда его правая часть содержит общий корень в числителе и знаменателе.
Таким образом:
 .
.
После
деления на ![]() получим связь между коэффициентами
получим связь между коэффициентами ![]() и
и ![]() и коэффициентами
и коэффициентами
![]() и
и ![]() .
.
Раскрыв скобки в предыдущем выражении, получим следующие соотношения:

![]()
Из
этих уравнений следует, что  .
.
Теперь можно записать соотношения для определения параметров регулятора:
Запишем передаточную функцию регулятора:
 .
.
В данном случае начальное значение управляющей переменной задано. Второе значение управляющей переменной будет равно:
 .
.
Необходимо выполнения условия ![]() т.е.:
т.е.:
 .
.
Произведем расчет апериодического регулятора повышенного порядка для нашей системы. Для этого воспользуемся математическим пакетом MATLAB.
for n=2:(m-1)
v0=0.1*q0
v(1)=v0*(a1(1)-1)+(1/sum(b1))
v(n)=v0*(a1(n)-a1(n-1))+(a1(n-1)/sum(b1))
vm=a1(n-1)*(-v0+(1/sum(b1)))
x1=v0*b1(1)
x(n)=v0*(b1(n)-b1(n-1))+(b1(n-1)/sum(b1))
xm=-b1(m-1)*(v0-(1/sum(b1)))
end
V=[v0 v vm]
X=[1 -x -xm]
Wu=tf(V,X,T)
Transfer function:
260.9 z^15 + 1638 z^14 - 5748 z^13 + 5590 z^12 - 1740 z^11
---------------------------------------------------------z^15 - 0.01794 z^3 - 0.2281 z^2 - 0.615 z - 0.139
Промоделируем систему в SIMULINK’е:
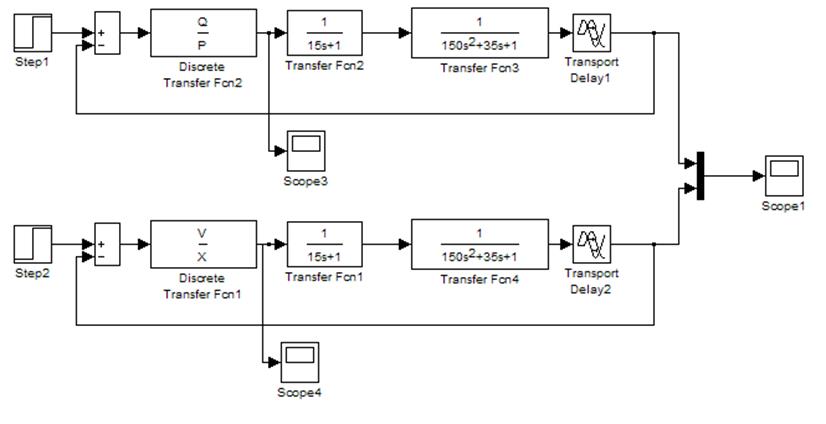
Сравним два регулятора.
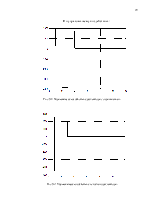
По управляющему воздействию:
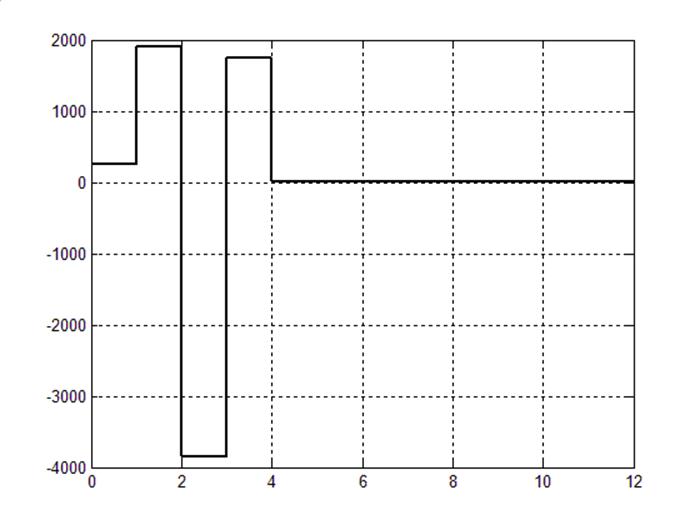
Рис.8.1. Управляющее воздействие регулятора с ограничением.
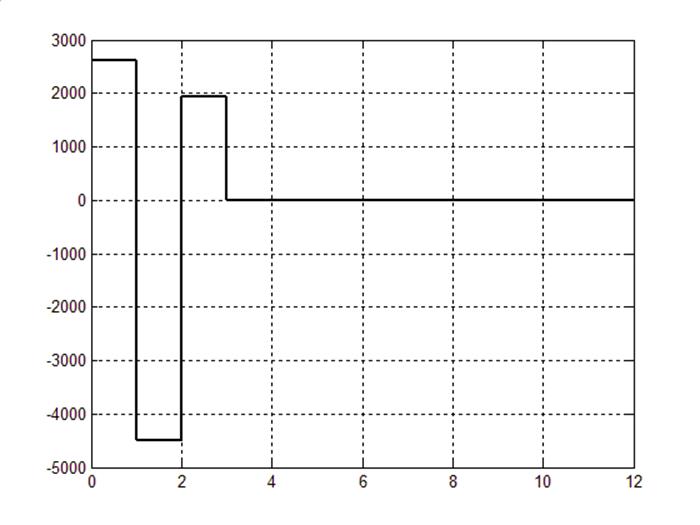
Рис.8.2. Управляющее воздействие исходного регулятора.
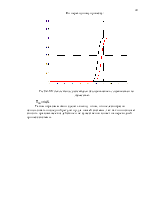
По переходному процессу:
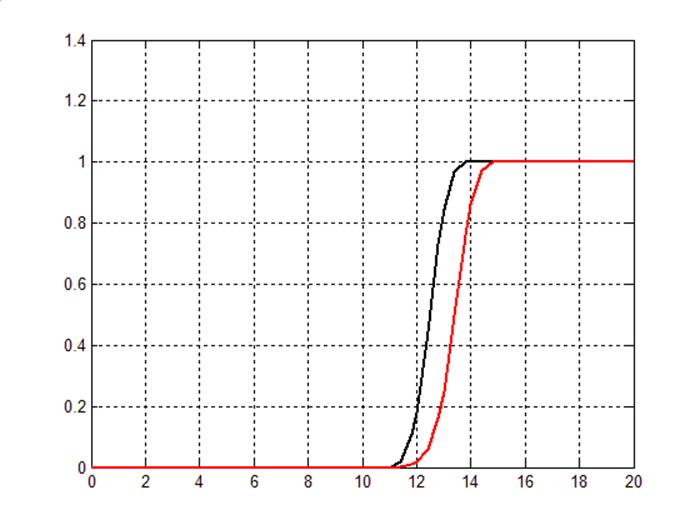
Рис.8.3. ПП для системы с регулятором без ограничения и с ограничением по управлению.
Tпп=14,5.
Таким образом можно сделать вывод о том, что целесообразно использовать последний регулятор для нашей системы, так как он позволяет снизить правляющее воздействие и не существенно влияет на переходный процесс системы.
Заключение
В данной курсовой работе были рассмотрены основные принципы работы с дискретными системами. Так, например, были проанализированы и применены такие методы как математическое преобразование модели объекта в дискретную модель из непрерывной, моделирование переходных характеристик объекта исходной модели и преобразованной, синтез дискретного регулятора, моделирование системы с учетом использования дискретного компенсатора, формирование критерия для оптимальной системы, аналитическое конструирование регулятора. Так же, как дополнительное задание, было выполнено ограничение по управляющему
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.