модели исполнительных, измерительных устройств, эталонная модель и т.п.
В простейшем случае цель управления задается в виде целевого неравенства
q£D при t³t*, D³0, (1.3)
где q(t) = q(X(t), U(t)) - целевая функция.
В задачах слежения в качестве целевой функции выбирается функция невязки между действительной и желаемой траекторией движения объекта q = q(E(t),t), E(t) = X(t)-XM(t). Желаемое поведение системы может быть задано, например, с помощью эталонной модели
![]() (1.4)
(1.4)
где ХмÎRn - вектор состояния эталонной модели, YÎRm - вектор задающих воздействий.
В частном случае при Хм(t) = 0 (задача стабилизации) получается целевая функция текущего состояния объекта q = q(X(t), t).
Задача синтеза состоит в нахождении алгоритма управления из заданного класса двухуровневых алгоритмов вида
U(t) = Ut (XB (t), U(t), Θ(t), Y(t)), (1.5)
Θ(t) = Θt((XB (t), U(t), Θ(t), Y(t)), (1.6)
обеспечивающих достижение ЦУ (1.3) в системе (1.1), (1.2), (1.5), (1.6) для каждого ξÎX. Здесь Ut(·), Θ(·) некоторые операторы. Если АдСУ функционирует в стохастической среде, то цель (1.3) заменяется «усредненной» целью
Мq£D при t³t* . (1.7)
Система (1.1), (1.2), (1.5), (1.6) называется адаптивной в классе X. по отношению к цели управления, заданной одним из неравенств (1.3), (1.7), если для любого ξÎX и при любых начальных условиях Х(0), U(0), Θ(0) выполняется соответствующее неравенство (1.3) или (1.7).
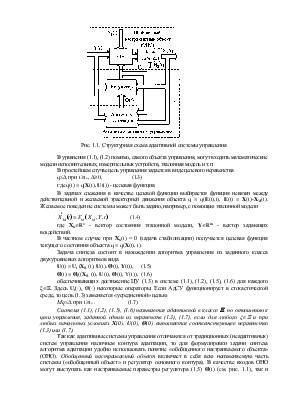
Так как адаптивные системы управления отличаются от традиционных (неадаптивных) систем управления наличием контура адаптации, то для формулировки задачи синтеза алгоритма адаптации удобно использовать понятие «обобщенного настраиваемого объекта» (ОНО). Обобщенный настраиваемый объект включает в себя всю неизменяемую часть системы («обобщенный объект» и регулятор основного контура). В качестве входов ОНО могут выступать как настраиваемые параметры регулятора (1.5) Θ(t) (см. рис. 1.1), так и входы обобщенного объекта U(t) (Θ(t) = U(t), если основной контур управления отсутствует. При этом формально описание системы в форме (1.1), (1.2) или в форме (1.1) - (1.3) представляет собой систему алгебраических и дифференциальных уравнений. В первом случае задача состоит в синтезе алгоритма адаптивного управления (1.5), (1.6), а во втором случае - алгоритма адаптации (1.6).
В рамках приведенных выше схем можно рассматривать также нестационарные задачи, в которых вектор неизвестных параметров меняется во времени (ξ =ξ(t)).
При этом вектор «идеальных», с точки зрения ЦУ, параметров регулятора Θ также зависит от времени. Он должен для достижения цели «отслеживать» дрейф неизвестных параметров, приспосабливаясь к изменяющимся условиям. Ясно, что такое поведение системы возможно лишь при медленном изменении ξ по сравнению с изменением состояния объекта X, когда в измерениях накапливается достаточно информации о дрейфе. При этом быстрые процессы управляются первым уровнем системы - регулятором, а медленные изменения отслеживаются вторым уровнем -адаптером. Двухуровневая система управления находится в соответствии с разделением движений объекта на быстрые (координатные) и медленные (параметрические).
Предположения о медленном изменении неизвестных параметров (гипотеза квазистационарности) практически означает, что параметры объекта считаются постоянными, «замороженными». Если же скорость изменения J; сравнима со скоростью процессов в объекте и изменением внешних воздействий, то целесообразно задаваться законом дрейфа £ , а параметры закона считать новыми параметрами. Тем самым задача сводится к квазистационарной.
1.3. МЕТОДЫ СИНТЕЗА АДАПТИВНЫХ СИСТЕМ
Условно методы синтеза адаптивных систем можно разделить
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.