





































режиме динамического торможения ![]() , поэтому
, поэтому ![]() , что
определяет электромеханическую
, что
определяет электромеханическую  и механическую
и механическую  характеристики. Следовательно, в режиме
динамического торможения линейные электромеханические и механические
характеристики проходят через начало координат.
характеристики. Следовательно, в режиме
динамического торможения линейные электромеханические и механические
характеристики проходят через начало координат.
Динамическое торможение наиболее эффективно при
больших скоростях. Для ограничения броска тормозного тока ![]() и момента
и момента ![]() якорь
электродвигателя замыкается на тормозное сопротивление
якорь
электродвигателя замыкается на тормозное сопротивление ![]() ,
величина которого определяется по формуле
,
величина которого определяется по формуле
 .
.
Энергетические соотношения: ![]() .
После умножения левой и правой части на
.
После умножения левой и правой части на ![]() получаем:
получаем:
![]() ,
, ![]() . Это
значит, что при динамическом торможении электромагнитная мощность
. Это
значит, что при динамическом торможении электромагнитная мощность ![]() превращается в потери
превращается в потери ![]() в тормозном сопротивлении
в тормозном сопротивлении ![]() обмотки якоря.
обмотки якоря.
Расчет времени торможения.Имеем
основное уравнение динамики:  , где
, где ![]() тормозной момент,
тормозной момент, ![]() момент
сопротивления (нагрузка),
момент
сопротивления (нагрузка), ![]() момент инерции.
момент инерции.
В свою очередь ![]() , где
, где  жесткость тормозной характеристики.
жесткость тормозной характеристики.
Тогда
 .
.
АЭП 5-4 Проинтегрировав получаем время торможения  .
.
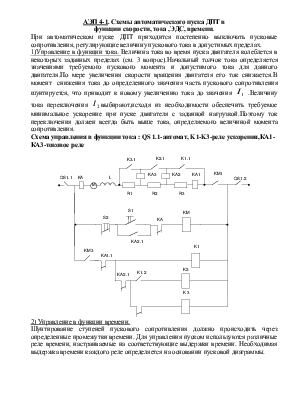
Схема динамического торможения в функции времени
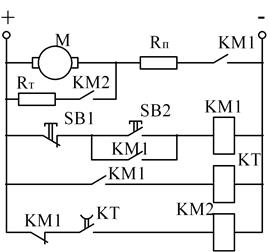
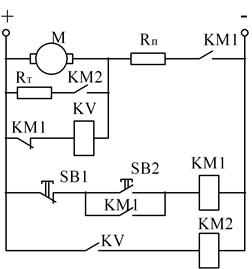
Схема динамического торможения в функции скорости
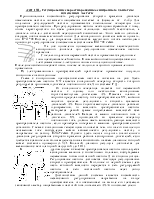
АЭП 6. Электромеханические свойства ДПТ последовательного возбуждения.
Рассмотрим уравнения статического режима:
 (1)
(1)
На основании (1) находим выражение электромеханической характеристики:
 (2) или
(2) или  (3)
(3)
Если обозначить постоянные коэффициенты
 (4)
(4)
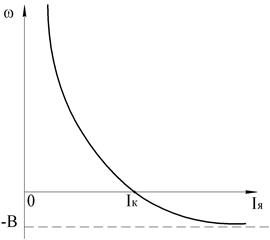
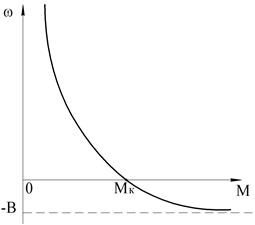
То получим уравнение гиперболы с асимптотами (0, ω) и (-В):
 (5)
(5)
Электромагнитный момент двигателя в этом случае пропорционален квадрату тока якоря
![]() (6)
(6)
Из (6) находим
 (7)
(7)
И подставляем в (5), в результате получаем уравнение механической характеристики ДПТ ПВ:
 (8), где
(8), где  (9)
(9)
Уравнение (8) выражает кривую гиперболического типа с теми же асимптотами, что и кривая (5).
 Уравнение (8) можно записать по иному
Уравнение (8) можно записать по иному  , что позволяет определить жесткость
механической характеристики:
, что позволяет определить жесткость
механической характеристики: (10)
(10)
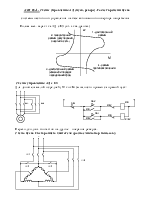
Отсюда видно, что жёсткость механической
характеристики ДПТ ПВ переменная и сильно зависит от скорости: при ![]() . Как следует из (5) и (8), ни при каких
условиях ДПТ ПВ с помощью изменения нагрузки (тока, момента) не может перейти
во второй квадрант плоскости
. Как следует из (5) и (8), ни при каких
условиях ДПТ ПВ с помощью изменения нагрузки (тока, момента) не может перейти
во второй квадрант плоскости ![]() или
или ![]() . Поэтому режим рекуперативного торможения
. Поэтому режим рекуперативного торможения ![]() не может быть реализован в ДПТ ПВ.
не может быть реализован в ДПТ ПВ.
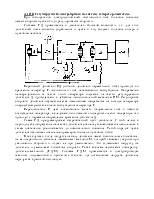
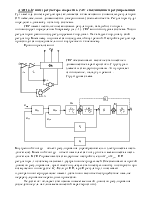
АЭП 7. Электромеханические и механические характеристики ДПТ при питании от тиристорного.
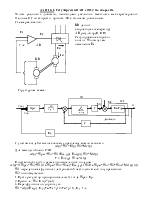
ТП состоит из силовой части (тиристоров) и системы импульсно-фазового управления (СИФУ). Динамические свойства ТП можно представить в виде апериодического звена с Т=0,007 – 0,01сек. С учетом низкой полосы пропускания двигателя и механической части ТП обычно принимают как безинерционное звено.
 -
уравнение электромеханической характеристики ДПТ;
-
уравнение электромеханической характеристики ДПТ;
 - уравнение
механической характеристики ДПТ;
- уравнение
механической характеристики ДПТ;
При питании ДПТ от ТП в этих уравнениях изменяется только значение U, характеристики ДПТ имеют вид:
Как видим, при питании ДПТ от ТП жесткость его характеристик не изменяется.
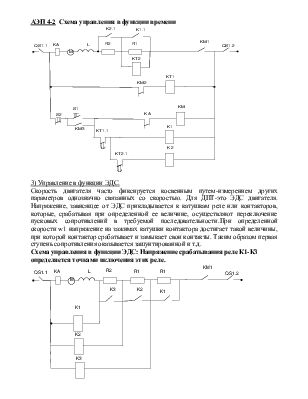
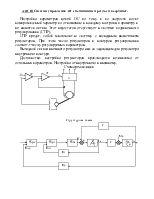
АЭП 8. Регулируемый электропривод по системе генератор-двигатель
При эксплуатации электродвигателей постоянного тока большое значение имеют вопросы пуска в ход и регулирования скорости.
Система Г-Д применяется в двигателях большой мощности, т.к. для этих двигателей иные способы управления и пуска в ход создают большие потери в пусковом реостате.
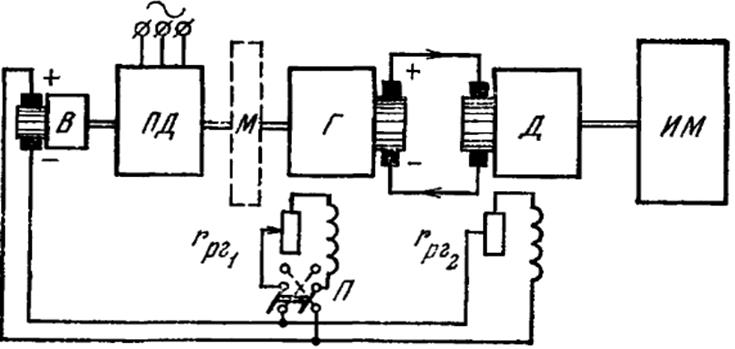
Первичный двигатель ПД (обычно двигатель переменного тока) приводит во вращение генератор Г постоянного тока независимого возбуждения. Напряжение непосредственно от щеток этого генератора подается на щетки регулируемого двигателя Д, приводящего в действие исполнительный механизм ИМ. Регулировка скорости двигателя осуществляется изменением напряжения на выходе генератора посредством реостата в цепи возбуждения генератора Г.
Переключатель П дает возможность менять направление тока в обмотке возбуждения генератора, а следовательно, изменять полярность щеток
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.