



Балтийский государственный
технический университет
им. Д. Ф. Устинова
«ВОЕНМЕХ»
Кафедра А5
Лабораторная работа по ТАУ №4
«Исследование устойчивости САУ. Построение области устойчивости в плоскости передаточных чисел автопилота i1 и i2»
Вариант №18
|
Санкт-Петербург 2012 год
Содержание лабораторной работы.
Цель лабораторной работы………………………………………………….стр. 2
Описание лабораторной работы……………………………………………стр. 2
Исходные данные к лабораторной работе…………………………………стр. 4
Исследование устойчивости САУ …………………………………………. стр.4
Листинг программы ………………………………………………………... стр. 4
Построение области устойчивости в плоскости передаточных чисел автопилота i1 и i2 ……………………………………………………………. стр.7
Листинг программы …………………………………………………………стр. 7
Определение области устойчивости САУ ………………………………..стр. 10
Цель работы: исследование устойчивости системы стабилизации угла рыскания ЛА с помощью критериев и моделирования. С помощью метода D – разбиения и моделирования построение области устойчивости и плоскости передаточных чисел i1 и i2 автопилота.
Описание лабораторной работы.
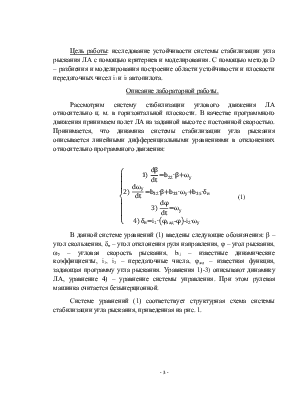
Рассмотрим систему стабилизации углового движения ЛА относительно ц. м. в горизонтальной плоскости. В качестве программного движения принимаем полет ЛА на заданной высоте с постоянной скоростью. Принимается, что динамика системы стабилизации угла рыскания описывается линейными дифференциальными уравнениями в отклонениях относительно программного движения:
|
В данной системе уравнений (1) введены следующие обозначения: β – угол скольжения, δн – угол отклонения руля направления, φ – угол рыскания, ωy – угловая скорость рыскания, bij – известные динамические коэффициенты, i1, i2 – передаточные числа, φзад – известная функция, задающая программу угла рыскания. Уравнения 1)-3) описывают динамику ЛА, уравнение 4) – уравнение системы управления. При этом рулевая машинка считается безынерционной.
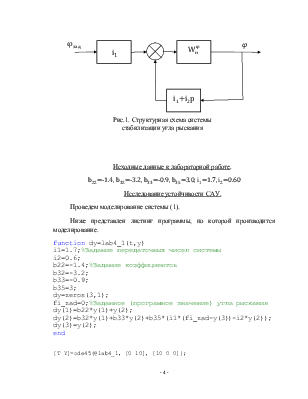
Системе уравнений (1) соответствует структурная схема системы стабилизации угла рыскания, приведенная на рис. 1.
|
Исходные данные к лабораторной работе.
![]()
Исследование устойчивости САУ.
Проведем моделирование системы (1).
Ниже представлен листинг программы, по которой производится моделирование.
function dy=lab4_1(t,y)
i1=1.7;%Задание передаточных чисел системы
i2=0.6;
b22=-1.4;%Задание коэффициентов
b32=-3.2;
b33=-0.9;
b35=3;
dy=zeros(3,1);
fi_zad=0;%Заданное (програмное значение) угла рыскания
dy(1)=b22*y(1)+y(2);
dy(2)=b32*y(1)+b33*y(2)+b35*(i1*(fi_zad-y(3))-i2*y(2));
dy(3)=y(2);
end
[T Y]=ode45(@lab4_1, [0 10], [10 0 0]);
figure;
plot(T, Y(:,1));
xlabel('Рисунок 2. Угол скольжения {\beta(t)}');
grid on;
figure;
plot(T, Y(:,2));
xlabel('Рисунок 3. Угловая скорость {\omega_y(t)}');
grid on;
figure;
plot(T, Y(:,3));
xlabel('Рисунок 4. Угол рыскания {\phi(t)}');
grid on;
clear all;
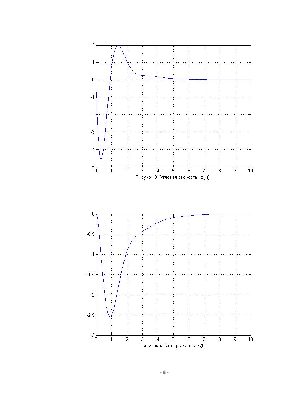
Получили следующие графики.
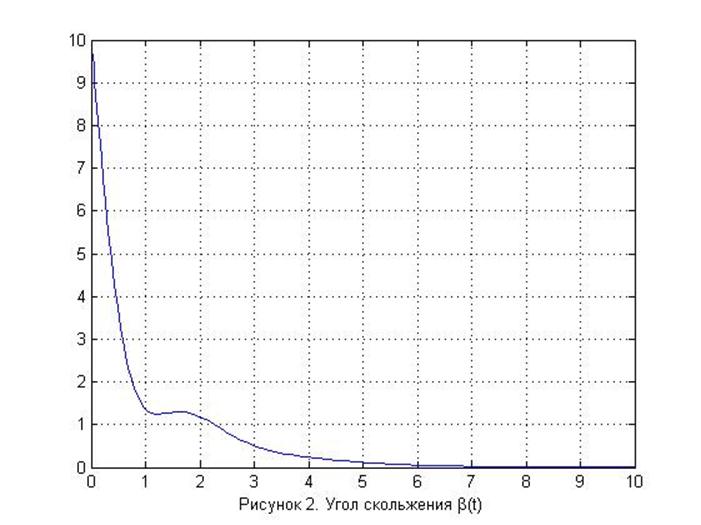
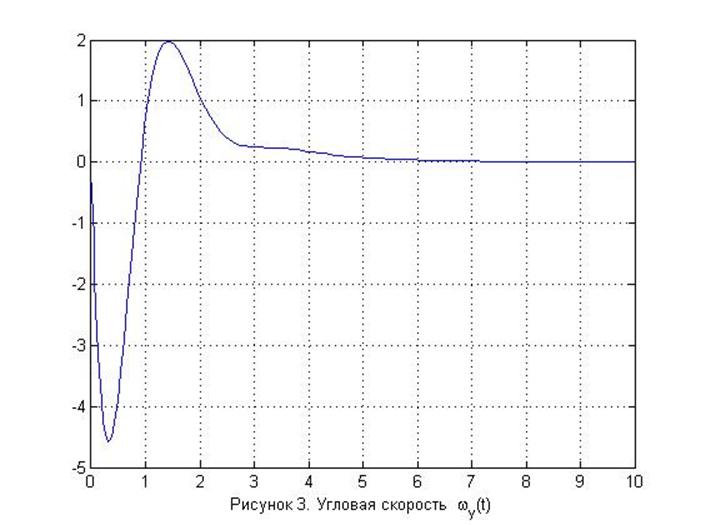
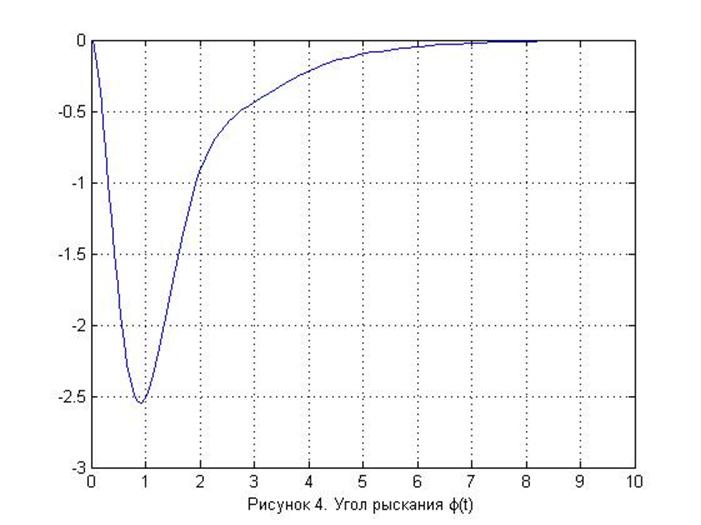
Из выше представленных графиков видно, что за время переходного процесса параметры β(t), ωy(t), φ(t) – затухающие, следовательно, САУ устойчива.
Построение области устойчивости в плоскости передаточных чисел автопилота i1 и i2.
Имеем характеристическое уравнение системы стабилизации угла рыскания:
![]()
Уравнение особой прямой определяется соотношением i1=0.
Для построения границ устойчивости в уравнение (2) поставляется p=j·ω. Получаем:
![]()
Приравнивая вещественную и мнимую часть в уравнении (3), получим два уравнения для определения i1 и i2:
-b35·b22·i2-b35·ω2·i2=-(b22+b35)·ω2;
b35·ω·i1-b35·b22·ω·i2=ω3-ω·b22b33+ω·b32. (4)
Решение системы (4) имеет вид:
Для автоматического определения i1(ω) и i2(ω) составим программу.
Ниже будет приведен листинг программы на языке программирования Matlab. В “%” будут приведены комментарии к соответствующим блокам программы.
clear all;
global ii1;
global ii2;
b22=-1.4;
b32=-3.2;
b33=-0.9;
b35=3;
w=0;
i=1;
i1(i)=w^2*(w^2+b22^2+b32)/(b35*(w^2+b22^2));%Выражение для вычисления i1(w)
i2(i)=(b33*w^2+b22*(b22*b33-b32))/(b35*(w^2+b22^2));
i=i+1;
w=w+0.1;
grid on;
figure;
plot(i1,i2,'-');
xlim([-1 5]);
ylim([-3 3]);
line([0 0],[-5 5]);
grid on;
xlabel('i1');
ylabel('i2');
hold on;
ii1=1.7;
ii2=0.6;
title('Область D-разбиения');
plot(ii1,ii2,'x');
plot(ii1,-ii2,'x');
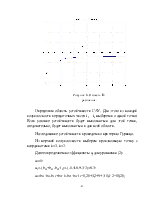
Далее получаем графики.
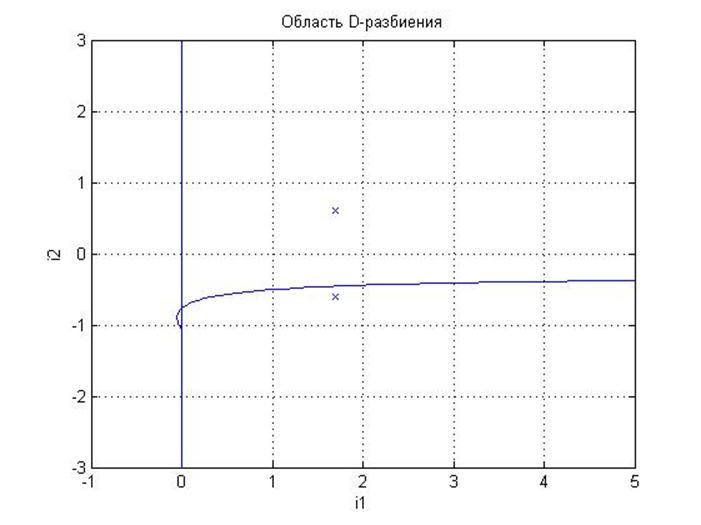
Определим область устойчивости САУ. Для этого из каждой полуплоскости передаточных чисел i1 – i2 выберем по одной точке. Если условие устойчивости будет выполняться для этой точки, следовательно, будет выполняться и для всей области.
Исследование устойчивости проведем по критерию Гурвица.
Из верхней полуплоскости выберем произвольную точку с координатами i1=3, i2=2.
Далее определяем коэффициенты aj для уравнения (2):
a0=1;
a1=-(b22+b33-b35·i2)=-(-1,4-0,9-3·2)=8,3;
a2=b22·b33-b32+b35·i1-b35·b22·i2=1,26+3,2+9+3·1,4·2=16,26;
a3=-b35·b22·i1=12,6;
Составляем определитель матрицы Гурвица:

Следовательно, САУ устойчива.
Проверим устойчивость САУ для точки i1=3, i2=-2.
a0=1; a1=-3,7; a2=5,06; a3=12,6.

Условие устойчивости САУ не выполнено.
Следовательно, область устойчивости находится выше D- кривой (см. рисунок 6).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.