



















|
|
|
|
|
 |
КАФЕДРА ПРИКЛАДНОЙ МЕХАНИКИ
к курсовому проекту по деталям машин
на тему: Привод двухвалкового рольганга
Автор проекта Бельтиков А. А.
Специальность 2102, компьютерное проектирование
Обозначение проекта КП-2068956 – 40 – 03 - 02
Группа КП - 91
Руководитель проекта Чешев В. Ф.
Проект защищен Оценка
Члены комиссии
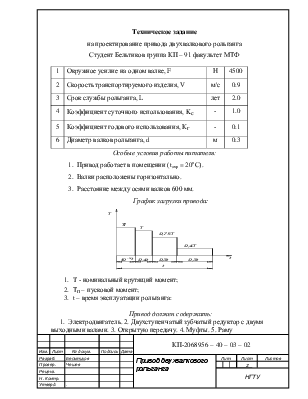
Студент Бельтиков группа КП – 91 факультет МТФ
|
1 |
Окружное усилие на одном валке, F |
Н |
4500 |
|
2 |
Скорость транспортируемого изделия, V |
м/с |
0.9 |
|
3 |
Срок службы рольганга, L |
лет |
2.0 |
|
4 |
Коэффициент суточного использования, Kс |
- |
1.0 |
|
5 |
Коэффициент годового использования, Кг |
- |
0.1 |
|
6 |
Диаметр валков рольганга, d |
м |
0.3 |
1. Привод работает в помещении (tокр = 20°С).
2. Валки расположены горизонтально.
3. Расстояние между осями валков 600 мм.
График загрузки привода:
1. T - номинальный крутящий момент;
2. Тп – пусковой момент;
3. t – время эксплуатации рольганга:
Привод должен содержать:
1. Электродвигатель. 2. Двухступенчатый зубчатый редуктор с двумя выходными валами. 3. Открытую передачу. 4. Муфты. 5. Раму
Введение
Двухвалковый рольганг – роликовый конвейер – устройство для транспортирования штучных грузов по роликам, размещённым на небольшом расстоянии один от другого на опорной станине.
Существуют различные виды конвейеров:
· Пластинчатый – конвейер, грузонесущее устройство которого состоит из отдельных пластин, прикреплённых к замкнутой теговой цепи.
· Скребковый – устройство для транспортирования груза скребками (волоком) по жёлобу или трубе.
· Толкающий – устройство, перемещающее изделие путём периодического проталкивания их по направляющим.
· Шаговый – устройство, служащее для перемещения изделий путём их периодического перекладывания на направляющих.
· Эстафетный – транспортирующее устройство, в котором груз перемещается путём захвата его с помощью одного механизма, передача груза другому механизму, захват груза этим другим механизмом и последующей передачи третьему механизму и т. д.
Преимущественно распространены неприводные рольганги – горизонтальные, по которым груз, уложенный на ролики, перемещается проталкиванием вручную, и наклонные, с маленькими углами наклона к горизонту, в которых перемещение груза осуществляется под действием его силы тяжести. Применяются и приводные рольганги – преимущественно в металлургической промышленности – с групповым или индивидуальным приводом роликов.
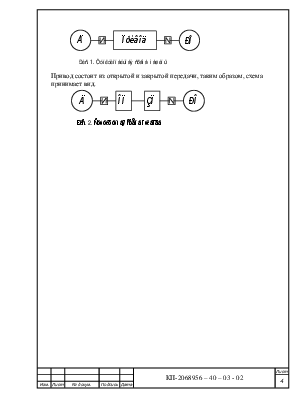
В общем случае машина (привод) может быть представлен функциональной схемой на рис.1.

Привод состоит из открытой и закрытой передачи, таким образом, схема принимает вид.
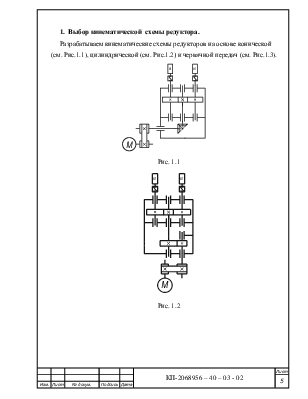
1. Выбор кинематической схемы редуктора.
Разрабатываем кинематические схемы редукторов на основе конической
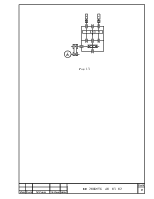
(см. Рис.1.1), цилиндрической (см. Рис.1.2) и червячной передач (см. Рис.1.3).
Рис. 1.1
Рис. 1.2
Рис. 1.3
2. Расчёт кинематических схем
Найдём частоту вращения исполнительного органа nио при d=300 мм
 [1,с.7]
[1,с.7]
, где V – скорость транспортируемого изделия
d – диаметр валков рольганга
Найдём выходную мощность двигателя
![]()
, где F – окружное усилие на одном валке
V – скорость транспортируемого изделия
Выберем по справочнику
электродвигатели с частотами вращения: 1000, 1500 и 3000 ![]()
Общее
передаточное число привода uоб рассчитаем по
формуле: 
Определим передаточное отношение редуктора uоб.р, приняв передаточное отношение открытой передачи uотк=2:
Выберем наиболее оптимальную схему
2.1 Схема 1 (см. рис. 1.1)
Зная передаточное число редуктора и используя предпочтительный ряд передаточных отношений для передач (ГОСТ 2144-76), подберем привод: двигатель 160S6/970, n1 =1000 об/мин.
Определим передаточные отношения быстроходной и тихоходной ступеней редуктора: uБ=2,5, uТ=3,55
Рассчитаем общее передаточное отношение:
![]()
Скорость исполнительного органа для рассчитанного передаточного числа будет равна:

Найдём ошибку по скорости исполнительного органа:

Условие точности выполняется ![]()
Рассчитаем КПД привода по формуле: ![]() , где
, где 
Мощность электродвигателя рассчитаем по формуле:
![]() , что обеспечивает выходную мощность Рвых=8,1 кВт
, что обеспечивает выходную мощность Рвых=8,1 кВт
2.2 Схема 2 (см. рис. 1.2)
Зная передаточное число редуктора и используя предпочтительный ряд передаточных отношений для передач (ГОСТ 2144-76), подберем привод: двигатель 132М4/1447, n2 =1500 об/мин.
Определим передаточные отношения быстроходной и тихоходной ступеней редуктора: uБ=3,15, uТ=4
Рассчитаем общее передаточное отношение:
![]()
Скорость исполнительного органа для рассчитанного передаточного числа будет равна:

Найдём ошибку по скорости исполнительного органа:

Условие точности выполняется ![]()
Рассчитаем КПД привода по формуле: ![]()
,где 
Мощность электродвигателя рассчитаем по формуле:
![]() , что
обеспечивает выходную мощность Рвых=8,1 кВт
, что
обеспечивает выходную мощность Рвых=8,1 кВт
2.3 Схема 3 (см. рис. 1.3)
Зная передаточное число редуктора и используя предпочтительный ряд передаточных отношений для передач (ГОСТ 2144-76), подберем привод: двигатель 132М2/2910, n1 =3000 об/мин.
Определим передаточные отношения быстроходной и тихоходной ступеней редуктора: uБ=8, uТ=3.15
Рассчитаем общее передаточное отношение:
![]()
Скорость исполнительного органа для рассчитанного передаточного числа будет равна:

Найдём ошибку по скорости исполнительного органа:
Условие точности выполняется ![]()
Рассчитаем КПД привода по формуле: ![]()
,где 
Мощность электродвигателя рассчитаем по формуле:
![]() <Рвых=8,1
кВт
<Рвых=8,1
кВт
Выберем более мощный двигатель с Ртр=15 кВт, тогда
![]() , что
обеспечивает выходную мощность Рвых=8,1 кВт
, что
обеспечивает выходную мощность Рвых=8,1 кВт
2.4 Выбор схемы
Выбираем схему 2 (см рис.1.2).
В этой схеме используется электродвигатель со скоростью вращения n=1500 об/мин, который имеет относительно малые габаритные размеры
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.