Ухтинский государственный технический университет
пояснительная записка к курсовому проекту по деталям машин
ДМ 01 00 00 00 ПЗ
Зачётная книжка № 980406
Оценка 2001г.
Выполнил студент гр. МОН-2-98 А.Р. Масагутов
Руководитель проекта Е.Л. Суровцев
2000
|
1. Задание……………………………………………………………………………………... 2. Кинематический и силовой расчёт привода……………………………………………... 3. Расчёт волновой зубчатой передачи ….…………………...……………..……………… 4. Расчёт цепной передачи…..…………………………………………………………….… 5. Предварительный расчёт валов…………………………………………………………... 6. Расчёт шпоночных соединений…………………………………………………………... 7. Проверка долговечности подшипников………………………………………………….. 8. Уточнённый расчёт валов редуктора…………………………………………………….. 9. Смазка привода……………………………………………………………………………. 10. Сборка привода……………………………………………………………………………. Литература……………………………………………………………………………………... |
3 4 7 12 17 18 19 20 22 23 24 |
1 Задание
Спроектировать привод, содержащий волновой редуктор и цепную передачу, по схеме 1, варианту 1 [1, с.20].
Ресурс 10000 часов, привод реверсивный. Кратковременные перегрузки не более максимального пускового момента выбранного электродвигателя. Крутящий момент на ведомой звёздочке Т3=0,5 кН×м и её частота вращения n3=8 об/мин. Схема привода дана на рисунке 1.1.
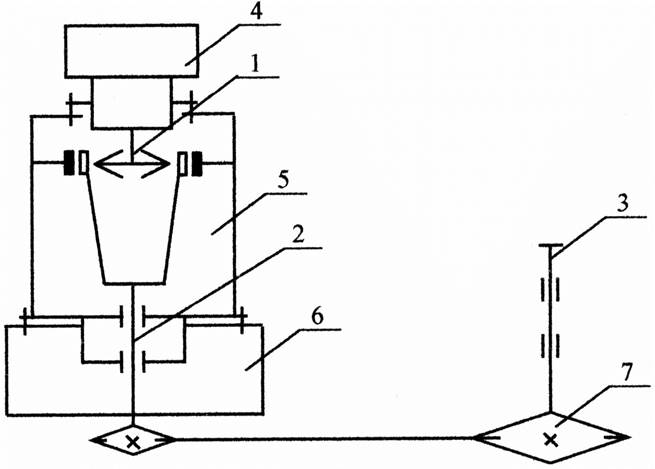
1 – вал электродвигателя и быстроходный вал редуктора; 2 – тихоходный вал редуктора; 3 – выходной вал привода; 4 – электродвигатель; 5 – зубчато-волновой редуктор; 6 – рама; 7 – ведомая звёздочка цепной передачи.
Рисунок 1.1 – Схема привода
2 Кинематический и силовой расчёт привода
2.1 Выбор электродвигателя
Требуемая мощность электродвигателя
 (2.1)
(2.1)
где Р3 – мощность на ведомой звёздочке (на выходе привода), кВт;
h - КПД привода.
КПД привода [2, с.4]
Мощность на ведомой звёздочке
 Вт
Вт
КПД привода [2, с.4]
![]() (2.2)
(2.2)
где hп, hв, hц – соответственно КПД пары подшипников качения, волновой и цепной передач.
Примечание
В формуле (2.2) принято, что КПД всех подшипников одинаковы.
Руководствуясь рекомендациями [2, с.4], принимаем hп = 0,99, hв = 0,8, hц = 0,97.
После подстановки численных значений параметров в формулу (2.2) получим КПД привода:
h = 0,99 × 0,8 × 0,97 = 0,768.
и требуемая мощность электродвигателя
 кВт.
кВт.
С учётом требуемой мощности Ртр = 0,545 кВт рассмотрим возможность выбора асинхронных двигателей серии 4А с номинальными мощностями Рн = 0,55 кВт. Перегрузка для него составляет [(0,55 – 0,545) × 100%] / 0,545 = 0,9% при допускаемой перегрузке 5%.
Окончательно выбираем [2, с.390] асинхронный электродвигатель 4А71А2У3 со следующими параметрами;
- номинальная мощность Рн = 0,55 кВт;
- номинальная частота вращения nн = nc× (1-S/100)=3000× (1-3,5/100)=2745 об/мин;
- отношение пускового момента к номинальному Тn/Tн = 2.
2.2 Общее передаточное отношение привода при частоте вращения входного вала привода n1 = nн
iобщ = n1 : n3 = nн : n3, (2.3)
Расчёт по формуле (2.3) даёт
iобщ = 2745 : 8 = 343
Примем [2, с.6] передаточные отношения для волновой передачи iв = 200, тогда на долю цепной передачи остаётся передаточное отношение iц = iобщ : iв = 343 : 200 = 1,715
2.3 Частоты вращения валов
n1 = nн = 2745 об/мин;
n2 = n1 : iв = 2745 : 200 = 13,725 об/мин;
n3 = n2 : iц = 8 об/мин;
Примечание. Здесь и далее параметры, относящиеся к валам приводам, обозначены числовыми индексами, соответствующими нумерации валов на рис. 1.1.
Угловые скорости валов:
w1 = p × n1 : 30 = 3,14 × 2745 : 30 = 287 рад/с;
w2 = w1 : iв = 287 : 200 = 1,437 рад/с;
w3 = w2 : iц = 1,437 : 1,715 = 0,838 рад/с;
w4 = w3 : iцеп. = 51,24 : 3,06 = 16,75 рад/с.
Мощности на валах привода:
Р1 = Ртр = 0,545 кВт;
Р2 = Р1 × hв = 0,545 × 0,8 = 0,436 кВт;
Р3 = Р2 × hц × hn = 0,436 × 0,97 × 0,99 = 0,419 кВт;
Моменты на валах привода
Т1 = Р1 : w1 = 0,545 : 287 = 1,9 Н×м;
Т2 = Р2 : w2 = 0,436 : 1,437 = 303 Н×м;
Т3 = Р3 : w3 = 0,413 : 0,838 = 493 Н×м;
Максимальный момент при перегрузке на первом валу (на валу двигателя)
Т1 мах = Тn = 2 × Тн (см. пункт 2.1.3).
Номинальной мощности двигателя Рн = 0,55 кВт соответствует номинальный момент Тн = Рн : w1 = 0,55 × 103 : 287 = 1,92 Н×м. Отсюда Т1 мах = 2 × Тн = 2 × 1,92 = 3,83 Н×м.
Очевидно при кратковременных перегрузках максимальные моменты на всех валах будут превышать моменты рассчитанные при передаче требуемой мощности (см. пункт 2.3), в Т1 мах : Т1 = 3,83 : 1,9 = 2 раза.
Исходя из этого соображения, получаем:
Т1 мах = Т1 × 2 = 1,9 × 2 = 3,8 Н×м;
Т2 мах = Т2 × 2 = 303 × 2 = 606 Н×м;
Т3 мах = Т3 × 2 = 493 × 2 = 986 Н×м;
2.4.Результаты расчётов, выполненных в подразделе 2.3, сведены в таблице 2.1.
Таблица 2.1 – Частоты вращения, угловые скорости, мощности и моменты на валах привода.
|
№ вала по рис. 1.1 |
n, об/мин |
w, рад/с |
Р, кВт |
Т, Н×м |
Т мах, Н×м |
|
1 |
2745 |
2871 |
0,545 |
1,9 |
3,8 |
|
2 |
14 |
1,44 |
0,436 |
303 |
606 |
|
3 |
8 |
0,84 |
0,419 |
493 |
986 |
3 Расчёт зубчатой передачи редуктора
3.1 Для расчёта приняты следующие исходные данные:
- вращающий момент на ведомом валу Т2=303 Н×м;
- частота вращения ведущего вала n1=2745 об/мин;
- частота вращения ведомого вала n2=14 об/мин;
- срок службы Ln=10000 часов.
3.2 Материал зубчатых колес конической передачи.
Задание не содержит ограничений на габариты привода, поэтому для гибкого колёса назначаем сталь 30ХН3А. (dв=900 МПа; d1= 450 МПа; t-1=260 МПа). Нагрузка меняется по нулевому циклу.
3.3 Предварительное значение диаметра делительной окружности гибкого колеса:
![]() мм;
мм;
Примем ![]() мм для увеличения модуля.
мм для увеличения модуля.
Толщина гибкого колеса под зубьями, условия его прочности (предварительные)
![]() мм.
мм.
Предварительное значение внутреннего диаметра гибкого колеса:
![]() (3.1)
(3.1)
где m' – предварительное значение модуля;
![]() – число зубьев гибкого колеса.
– число зубьев гибкого колеса.
Предварительное значение модуля:
 (3.2)
(3.2)
Предварительное значение числа зубьев гибкого колеса.
![]()
Расчёт по формуле (3.2) даёт m'=160¸400=0,4
Расчёт по формуле (3.1) даёт
3.4 Выбираем гибкий подшипник: наружный диаметр его вычисляем по формуле

Выбираем по табл. П9 [2, с.406] приложения подшипник 830, имеющий размеры D = 200 мм, d = 150 мм, в=30 мм, r=1 мм.
Окончательное значение модуля
 мм;
мм;
Ближайшее стандартное значение модуля m=0,5 мм
Окончательно значение числа зубьев гибкого колеса при принятых значениях D и m определяет по формуле:
Окончательно принимаем z2=396
Число зубьев жёсткого колеса при nw=2 и К=1 находим по формуле
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.