


























|
УТВЕРЖДАЮ Первый проректор СПГГИ (ТУ) профессор _________________ Н.В. ПАШКЕВИЧ “_____”________________2002 |
ТЕСТЫ К ЭКЗАМЕНУ
по учебной
дисциплине
”Теория автоматического управления”
для
студентов специальности 210200
”Автоматизация технологических процессов и производств”
направления 550200 ”Автоматизация и управление”
Санкт-Петербург
2002
|
Вариант №1 |
|||||
|
№ |
Вопросы |
Варианты ответов |
|||
|
1. |
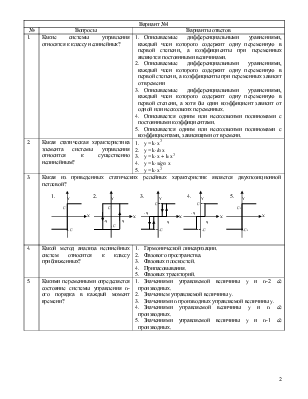
Какие системы управления относятся к классу нелинейных? |
1. Описываемые дифференциальными уравнениями, каждый член которого содержит одну переменную в первой степени, а коэффициенты при переменных являются постоянными величинами. 2. Описываемые дифференциальными уравнениями, каждый член которого содержит одну переменную в первой степени, а коэффициенты при переменных зависят от времени 3. Описываемые дифференциальными уравнениями, каждый член которого содержит одну переменную в первой степени, а хотя бы один коэффициент зависит от одной или нескольких переменных. 4. Описывается одним или несколькими полиномами с постоянными коэффициентами. 5. Описывается одним или несколькими полиномами с коэффициентами, зависящими от времени. |
|||
|
2. |
Какая статическая характеристика элемента системы управления относится к существенно нелинейным? |
1. y = k×x2 2. y = k×ln x 3. y = k×x + k×x2 4. y = k×sign x 5. y = k×x2 |
|||
|
3. |
Какая из приведенных статических релейных характеристик является двухпозиционной петлевой?
|
||||
|
4. |
Какой метод анализа нелинейных систем относится к классу приближенных? |
1. Гармонической линеаризации. 2. Фазового пространства. 3. Фазовых плоскостей. 4. Припасовывания. 5. Фазовых траекторий. |
|||
|
5. |
Какими переменными определяется состояние системы управления n-ого порядка в каждый момент времени? |
1. Значениями управляемой величины y и n-2 её производных. 2. Значением управляемой величины y. 3. Значениями n производных управляемой величины y. 4. Значениями управляемой величины y и n её производных. 5. Значениями управляемой величины y и n-1 её производных. |
|||
|
6. |
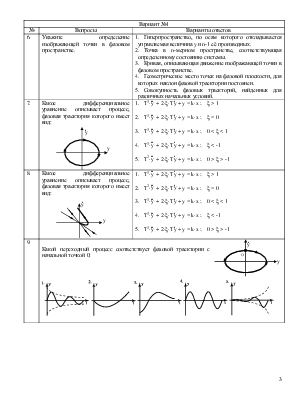
Укажите определение изображающей точки в фазовом пространстве. |
1. Гиперпространство, по осям которого откладывается управляемая величина y и n-1 её производных. 2. Точка в n-мерном пространстве, соответствующая определенному состоянию системы. 3. Кривая, описывающая движение изображающей точки в фазовом пространстве. 4. Геометрическое место точек на фазовой плоскости, для которых наклон фазовой траектории постоянен. 5. Совокупность фазовых траекторий, найденных для различных начальных условий. |
|||
|
7. |
|
1. T2× 2. T2× 3. T2× 4. T2× 5. T2× |
|||
|
8. |
|
1. T2× 2. T2× 3. T2× 4. T2× 5. T2× |
|||
|
9. |
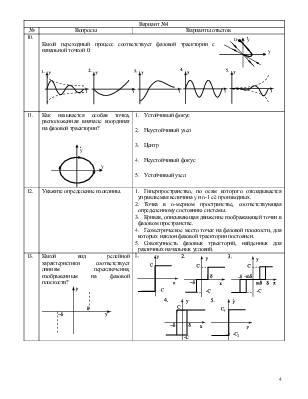
Какой переходный процесс соответствует фазовой траектории с начальной точкой 0:
|
||||
|
10. |
Какой переходный процесс соответствует фазовой траектории с начальной точкой 0:
|
||||
|
11. |
|
1. Устойчивый фокус 2. Неустойчивый узел 3. Центр 4. Неустойчивый фокус 5. Устойчивый узел |
|||
|
12. |
Укажите определение изоклины. |
1. Гиперпространство, по осям которого откладывается управляемая величина y и n-1 её производных. 2. Точка в n-мерном пространстве, соответствующая определенному состоянию системы. 3. Кривая, описывающая движение изображающей точки в фазовом пространстве. 4. Геометрическое место точек на фазовой плоскости, для которых наклон фазовой траектории постоянен. 5. Совокупность фазовых траекторий, найденных для различных начальных условий. |
|||
|
13. |
Какой вид релейной характеристики соответствует линиям переключения, изображенным на фазовой плоскости?
|
|
|||
|
14. |
Каким дифференциальным уравнением описывается поведение релейной
системы с передаточной функцией линейной части
|
1. T× 2. T× 3. T× 4. T× 5. T× |
|||
|
15. |
Каким дифференциальным уравнением описывается поведение релейной
системы с передаточной функцией линейной части
|
1. T× 2. T× 3. T× 4. T× 5. T× |
|||
|
16. |
Какая фазовая траектория соответствует релейной АСУ с идеальной двухпозиционной релейной характеристикой?
|
||||
|
17. |
Укажите определение автоколебаний. |
1. Колебания, возникающие в автономной системе в результате ненулевых начальных условий. 2. Периодические колебания, возникающие в автономных системах. 3. Устойчивые периодические колебания в нелинейных системах с подводом энергии. 4. Периодические колебания в системах, обусловленные воздействием периодических внешних сил. 5. Вибрации малой амплитуды и большой частоты вокруг линии переключения. |
|||
|
18. |
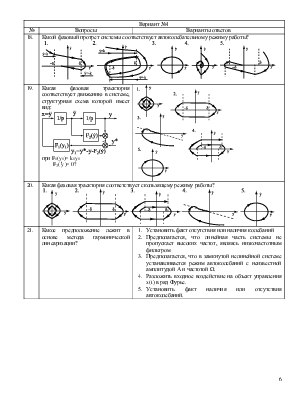
Какой фазовый протрет системы соответствует автоколебательному режиму работы?
|
||||
|
19. |
Какая фазовая траектория соответствует движению в системе, структурная схема которой имеет вид:
при F1(y1)= k1y1 F2( |
|
|||
|
20. |
Какая фазовая траектория соответствует скользящему режиму работы?
|
||||
|
21. |
Какое предположение лежит в основе метода гармонической линеаризации? |
1. Установить факт отсутствия или наличия колебаний 2. Предполагается, что линейная часть системы не пропускает высоких частот, являясь низкочастотным фильтром 3. Предполагается, что в замкнутой нелинейной системе устанавливается режим автоколебаний с неизвестной амплитудой А и частотой Ω. 4. Разложить входное воздействие на объект управления x(t) в ряд Фурье. 5. Установить факт наличия или отсутствия автоколебаний. |
|||
|
22. |
По какой формуле находится коэффициент ВК ряда
|
1. 2. 3. 4. 5. |
|||
|
23. |
Какое уравнение описывает нелинейное, гармонически линеаризованное звено в области вещественного переменного? |
1. 2. 3. 4. 5. |
|||
|
24. |
Какое из выражений представляет передаточную функцию гармонически линеаризованного звена? |
1. 2. 3. 4. 5. |
|||
|
25. |
Укажите характеристическое уравнение замкнутой гармонически линеаризованной системы управления. |
1. 2. 3. 4. 5. |
|||
|
26. |
Как выглядит условие Гурвица, позволяющее определить частоту и амплитуду колебаний в нелинейных АСУ? |
1. 2. 3. 4. 5. |
|||
|
27. |
Какое расположение кривых Михайлова на комплексной плоскости при различных амплитудах колебания соответствует установлению в нелинейной АСУ автоколебаний?
|
||||
|
28. |
Какие преимущества метода гармонической линеаризации по сравнению с методом фазовой плоскости? |
1. Принципиально позволяет выявить наличие или отсутствие колебаний в нелинейной АСУ для систем, описываемых дифференциальными уравнениями любого порядка. 2. Позволяет осуществить замену нелинейного звена статистически линеаризованным. 3. Позволяет линеаризовать существенную нелинейность системы по отношению к медленно меняющимся внутренним воздействиям. 4. Позволяет исследовать АСУ, описываемую дифференциальным уравнением не выше второго порядка. 5. Позволяет осуществить линеаризацию гладких нелинейностей в окрестностях рабочей точки. |
|||
|
29. |
Найдите коэффициенты гармонической линеаризации для звена с трехпозиционной идеальной релейной характеристикой. |
1. 2. 3. 4. 5. |
|||
|
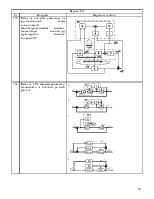
30. |
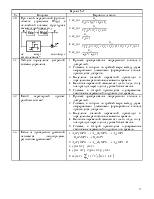
При какой передаточной функции объекта управления Wo(р) в нелинейной системе, структурная схема которой имеет вид
не могут возникнуть автоколебания? |
1. 2. 3. 4. 5. |
|||
|
31. |
Найдите определение дискретной системы управления. |
1. Процесс преобразования непрерывного сигнала в дискретный. 2. Системы, в которых по крайней мере, между двумя непрерывными элементами формирование сигнала производится дискретно. 3. Выделение значений переменной происходит в определенные равностоящие моменты времени. 4. Величина переменной изменяется только тогда, когда она проходит через один из уровней квантования. 5. Система, в которой производится одновременное квантование переменной по уровню и по времени. |
|||
|
32. |
Какой характерный признак релейных систем? |
1. Процесс преобразования непрерывного сигнала в дискретный. 2. Системы, в которых по крайней мере, между двумя непрерывными элементами формирование сигнала производится дискретно. 3. Выделение значений переменной происходит в определенные равностоящие моменты времени. 4. Величина переменной изменяется только тогда, когда она проходит через один из уровней квантования. 5. Система, в которой производится одновременное квантование переменной по уровню и по времени. |
|||
|
33. |
Какое из приведенных уравнений называется неоднородным, разностным уравнением? |
1. 2. 3. 4. 5. |
|||
|
34. |
Какое из приведенных выражений соответствует первой разности? |
1. 2. 3. 4. 5. |
|||
|
35. |
Какое из приведенных выраже- |
1. 2. 3. 4. 5. |
|||
|
36. |
Найдите дискретное преобразование Лапласа решетчатой функции. |
1. 2. 3. 4. 5. |
|||
|
37. |
Какое выражение соответствует z-преобразованию единичной решетчатой функции X(nT)=1(nT)? |
1. 2. 3. 4. 5. |
|||
|
38. |
Какое соотношение характери-зует свойство линейности z-преобразования? |
1. 2. 3. 4. 5. |
|||
|
39. |
Какое выражение соответствует модернизированному z-преобра-зованию? |
1. 2. 3. 4. 5. |
|||
|
40. |
Какая процедура называется обратным z-преобразованием? |
1. Нахождение оригинала x(nT) по известному z-преобразованию. 2. Определение коэффициента при z-n разложением в ряд Лорана изображения X(z). 3. Определение относится ли функция X(z) к классу дробно рациональных. 4. Нахождение изображения X(z) по известному оригиналу x(nT). 5. Определение, относится ли функция X(z) к классу экспоненциальных. |
|||
|
41. |
Каким параметром импульсов соответствует амплитудно-импульс-ная модуляция прямоугольных импульсов (Т – период квантования по времени; tн – длительность импульсов; Н – высота импульсов)? |
1. T = const; tн = k|x(nT)|; H=const. 2. T = k1|x(nT)|; tн = const; H=k2sign(x(nT)). 3. T = const; tн = const ;H= k|x(nT)|. 4. T = const; tн = const ;H= kx(nT). 5. T = const; tн = k1|x(nT)|; H=k2sign(x(nT)). |
|||
|
42. |
Что такое импульсный фильтр? |
1. Устройство, состоящее из последовательно включенных линейных звеньев. 2. Отношение z-преобразований выходной переменной объекта Y(z) к входной X(z) – при z = e-jωt. 3. Устройство, состоящее из последовательного включенных импульсного элемента и непрерывной части. 4. Устройство, преобразующее непрерывный сигнал в последовательность импульсов, параметры которых пропорциональны сигналу x(t), при t=nT. 5. Отношение z- преобразований выходной переменной объекта Y(z) к входной X(z) – при x(nT) = 0, для n ≤ 0 |
|||
|
43. |
Что такое дискретная частотная функция? |
1. Устройство, состоящее из последовательно включенных линейных звеньев. 2. Отношение z-преобразований выходной переменной объекта Y(z) к входной X(z) – при z = e-jωt. 3. Устройство, состоящее из последовательного включенных импульсного элемента и непрерывной части. 4. Устройство, преобразующее непрерывный сигнал в последовательность импульсов, параметры которых пропорциональны сигналу x(t), при t=nT. 5. Отношение z- преобразований выходной переменной объекта Y(z) к входной X(z) – при x(nT) = 0, для n ≤ 0 |
|||
|
44. |
Какое из приведенных выражений определяет дискретную передаточную функцию? |
1. 2. 3. 4. 5. |
|||
|
45. |
Какому условию должна отвечать выходная координата импульсной системы y(nT) для устойчивой астатической системы? |
1.
2.
3.
4.
5.
|
|||
|
46. |
Какому условию должен отвечать хотя бы один корень характеристического уравнения zk, чтобы импульсная система потеряла устойчивость? |
1.
2.
3.
4.
5.
|
|||
|
47. |
Какие условия в соответствии с критерием Гурвица должны выполняться, чтобы импульсная сис-тема была устойчива? |
1. Все определители Гурвица w – преобразованного разностного уравнения должны быть положительны. 2. Все определители Гурвица должны быть положительны. 3. Все определители Гурвица w – преобразованного разностного уравнения и коэффициент a0 должны быть положительны. 4. Хотя бы один определитель Гурвица был отрицателен. 5. Хотя бы один определитель Гурвица был равен нулю. |
|||
|
48. |
Какие условия в соответствии с критерием Михайлова должны выполняться, чтобы замкнутая импульсная система была устойчива? |
1. Необходимо
и достаточно, чтобы кривая Михайлова 2. Необходимо
и достаточно, чтобы вектор кривой Михайлова 3. Необходимо
и достаточно, чтобы вектор кривой Михайлова 4. Необходимо
и достаточно, чтобы вектор кривой Михайлова 5. Необходимо и достаточно, чтобы вектор кривой Михайлова прошел 4m квадрантов в положительном направлении, нигде не обратившись в нуль. |
|||
|
49. |
Какие условия в соответствии с критерием Найквиста должны выполняться, чтобы замкнутая импульсная система была неустойчива? |
1. Необходимо
и достаточно, чтобы АФЧХ разомкнутой системы 2. Необходимо
и достаточно, чтобы АФЧХ разомкнутой системы 3. Необходимо
и достаточно, чтобы АФЧХ разомкнутой системы 4. Необходимо
и достаточно, чтобы АФЧХ разомкнутой системы 5. Необходимо,
чтобы АФЧХ разомкнутой системы |
|||
|
50. |
Какое определение соответствует понятию оптимальной системы? |
6. Система, в которой структура и параметры остаются неизменными в процессе ее функционирования 7. Система, которой тем или иным способом приданы наилучшие качества в каком-либо определенном смысле 8. Система, осуществляющая изменение своих свойств с целью достижения удовлетворительного функционирования в изменяющихся условиях 9. Система, в которой могут изменяться управляющие воздействия, структура и параметры АСУ 10. Система, осуществляющая минимизацию влияния случайных возмущений на ее функционирование |
|||
|
51. |
Какому из перечисленных требований должен удовлетворять критерий эффективности работы системы? |
1. Иметь несколько экстремумов 2. Не быть связанным с управляющими воздействиями 3. Обладать избыточной информацией 4. Быть связанным с управляющими воздействиями 5. Не быть связанным с экономическими показателями |
|||
|
52. |
Какому из перечисленных требований должен удовлетворять критерий эффективности работы системы? |
1. Иметь несколько экстремумов 2. Не быть связанным с управляющими воздействиями 3. Информация необходимая для формирования критерия не должна быть избыточна 4. Обладать избыточной информацией 5. Не быть связанным с экономическими показателями |
|||
|
53. |
Минимизация какого критерия Q отражает требование максимальной точности работы системы? |
1. 2. 3. 4. 5. |
|||
|
54. |
При каких условиях объект управления работает в установившемся режиме? |
1. Когда энергия, запасенная в объекте, соответствует координатам системы 2. Когда энергия, запасенная в объекте, не соответствует координатам системы 3. Когда энергия, запасенная в объекте, превышает соответствующие значения координат системы 4. Когда энергия подводимая к объекту ограничена 5. Когда координаты системы превышают соответствующее значение запасенной энергии |
|||
|
55. |
Найдите определение теоремы о количестве интервалов управления в системах оптимальных по быстродействию, где n – порядок дифференциального уравнения, описывающего поведение объекта управления. |
1. Количество переключений управления равно n+1. 2. Количество переключений управления равно n-1. 3. Количество интервалов управления равно n-1. 4. Количество интервалов управления равно n. 5. Количество интервалов управления равно n+1. |
|||
|
56. |
Найдите область применения классического вариационного исчисления при синтезе оптимальных систем. |
1. Применяется,
когда области изменения координат 2. Применяется,
когда области изменения координат 3. Применяется,
когда область изменения координат 4. Применяется,
когда область изменения координат 5. Применяется,
когда вектора |
|||
|
57. |
Какие исходные данные необходимы для синтеза оптимальной системы управления? |
1. Математическое описание объекта управления и формализация цели управления 2. Корреляционная функция или спектральная плотность входных сигналов и структура АСУ 3. Математическое описание объекта управления, включая ограничения, налагаемые на координаты системы, и формализованное выражение цели управления 4. Корреляционная функция полезного сигнала и помехи, а также желаемый оператор преобразования полезного сигнала 5. Корреляционная функция и спектральная плотность входных сигналов |
|||
|
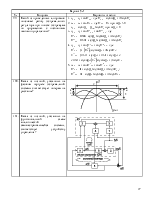
58. |
Какому графику соответствует экстремаль критерия оптимальности вида
|
1. 2. 3. 4. 5. |
|||
|
59. |
Найдите определение приращения функции. |
1. Переменная величина z, зависящая от другой переменной x, каждому значению которой соответствует число 2. Переменная величина v, зависящая от функции y(x), каждому виду которой соответствует число 3. Разность между двумя значениями независимой переменной x 4. Разность между двумя функциями y(x), меняющимися произвольно в некотором классе функций 5. Дифференциал функции во внутренней точке равен нулю |
|||
|
60. |
Как формулируется условие достижения экстремума функционала |
1. Переменная величина z, зависящая от другой переменной x, каждому значению которой соответствует число 2. Переменная величина v, зависящая от функции y(x), каждому виду которой соответствует число 3. Вариация функционала равна нулю 4. Разность между двумя функциями y(x), меняющимися произвольно в некотором классе функций 5. Дифференциал функции во внутренней точке равен нулю |
|||
|
61. |
Найдите постановку задачи о брахистохроне |
1. Найти алгоритм управления машиной – двигателем, при котором обеспечиваются минимальные затраты энергии 2. Найти уравнение траектории соединяющей две заданные точки, не лежащие на одной вертикали, по которой материальная точка скатится за кратчайшее время 3. Найти закон управления машиной – двигателем, при котором обеспечивается максимальное быстродействие 4. Найти линию наименьшей длины, соединяющей две заданные точки на некоторой поверхности 5. Найти уравнение замкнутой линии заданной длины, ограничивающей плоскую фигуру с максимальной площадью |
|||
|
62. |
Решение каких уравнений позволяет найти экстремаль
функционала вида |
1. 2. 3. 4. 5. |
|||
|
63. |
Решение каких уравнений позволяет найти экстремаль функционала
вида |
1.
2.
3.
4.
5.
|
|||
|
64. |
Найдите правильную формализацию задачи оптимального по быстродействию управления двигателем постоянного тока при отработке заданного перемещения, с учетом ограничений на нагрев. |
1.
Найти экстремаль функционала 2.
Найти экстремаль функционала 3.
Найти экстремаль функционала 4.
Найти экстремаль функционала 5.
Найти экстремаль функционала |
|||
|
65. |
Какой закон изменения частоты вращения получается при синтезе системы управления двигателем постоянного тока оптимальной по быстродействию |
1. линейный 2. параболический 3. экспоненциальный 4. трапецедальный 5. гиперболический |
|||
|
66. |
Что такое аналитическое конструирование оптимального регулятора с помощью классического вариационного исчисления в общем виде |
1. Методика определения параметров изменяемой части системы, при которой критерий оптимальности экстремизируется 2. Методика определения параметров оптимального фильтра 3. Методика определения параметров и структуры оптимального фильтра 4. Методика определения параметров и структуры изменяемой части системы, при которых критерий оптимальности экстремизируется 5. Методика синтеза регулятора для заданного объекта при заданных ограничениях и критерии оптимальности |
|||
|
67. |
Найдите формулировку принципа оптимальности Беллмана |
1. Оптимальная стратегия управления не зависит от «предистории» системы, а определяется ее состоянием в настоящий момент времени 2. Переход от непрерывного математического описания к конечно – разностному 3. Оптимальная стратегия управления не зависит от «предистории» системы, а определяется ее состоянием в настоящий момент времени и целью управления 4. Оптимальная стратегия управления не зависит от «предистории» системы, а определяется целью управления 5. Переход от конечно – разностного математического описания к непрерывному |
|||
|
68. |
6. Какие приемы, позволяющие свести решение задачи к последовательной минимизации функции одной переменной, применяются при выводе уравнения динамического программирования? |
1. Движение от конца процесса к его началу; 2. Дискретизация математического описания системы; 3. Дискретизация математического описания системы с последующим движением процесса от начала к его концу; 4. Дискретизация математического описания системы с последующим движением от конца процесса к его началу. 5. Движение от начала процесса к его концу; |
|||
 Какое дифференциальное уравнение
описывает процесс, фазовая траектория которого имеет вид:
Какое дифференциальное уравнение
описывает процесс, фазовая траектория которого имеет вид: Какое дифференциальное уравнение
описывает процесс, фазовая траектория которого имеет вид:
Какое дифференциальное уравнение
описывает процесс, фазовая траектория которого имеет вид:

 Как называется особая точка,
расположенная вначале координат на фазовой траектории?
Как называется особая точка,
расположенная вначале координат на фазовой траектории?






 при слабом демпфировании
(
при слабом демпфировании
(



 при условии, что
при условии, что  при
при  ;
; 
 при
при  при
при  при
при  ;
;