2.3 Розрахунок асинхронного двигуна
Двигун який використовується в даному електроприводі являється асинхронним коротко замкнутим. Для розрахунку трифазного асинхронного двигуна приймаємо такі дані:
номінальна
напруга 220/380 В (фазна/лінійна) при частоті ![]() ;
;
номінальне
ковзання ![]() ;
;
потужність на
валу ![]() ;
;
число пар полюсів
![]() ;
;
перевантажена
здатність з обертового моменту ![]() ;
;
схема з’єднання обмоток статора – зірка (рис 2.3);
ККД ![]() ;
;
коефіцієнт
потужності ![]() ;
;
кратність
пускового струму ![]() .
.
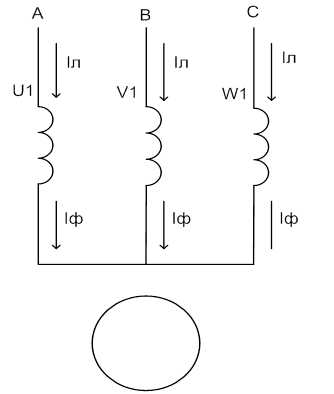
Рисунок 2.3 - Електрична схема з’єднання обмоток статора – зірка
При з’єднанні обмоток статора зіркою:
![]() (2.1)
(2.1)
де ![]() -
відповідно лінійна і фазна напруга обмотки статора. Тому лінійна напруга
мережі:
-
відповідно лінійна і фазна напруга обмотки статора. Тому лінійна напруга
мережі:
![]() (2.2)
(2.2)
Синхронна частота обертання поля статора
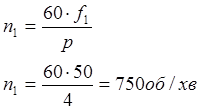 (2.3)
(2.3)
Номінальна частота обертання ротора:
 (2.4)
(2.4)
Щоб визначити критичну частоту обертання ротора
![]() (2.5)
(2.5)
необхідно знати критичне ковзання
двигуна ![]() . Це таке ковзання
. Це таке ковзання ![]() ,
при якому обертаючий момент
,
при якому обертаючий момент ![]() досягає максимального
значення
досягає максимального
значення![]() .
.
Для визначення ![]() використовуємо відому формулу Клосса.
використовуємо відому формулу Клосса.
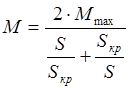 (2.6)
(2.6)
і номінальний режим роботи двигуна, при якому номінальному значенню ковзання відповідає номінальне значення обертаючого моменту.
 (2.7)
(2.7)
Зважаючи на те, що перевантажна
здатність з обертаючого моменту  , з попередньої формули
маємо
, з попередньої формули
маємо
 (2.8)
(2.8)
звідки отримуємо квадратне рівняння:
![]() (2.9)
(2.9)
розв’язання якого дає вираз та значення критичного ковзання:
 (2.10)
(2.10)
Таким чином, критична частота обертання ротора
![]()
Номінальна потужність, споживана двигуном із мережі:
 (2.11)
(2.11)
Сума всіх втрат у двигуні
 (2.12)
(2.12)
При напрузі мережі ![]() фази обмотки статора з’єднуються зіркою.
При цьому лінійний і фазний струми однакові:
фази обмотки статора з’єднуються зіркою.
При цьому лінійний і фазний струми однакові:
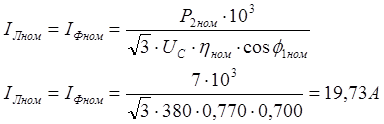 (2.13)
(2.13)
Пускові струми
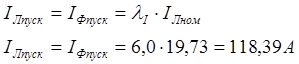 (2.14)
(2.14)
Номінальний і максимальний обертаючі моменти
 (2.15)
(2.15)
 (2.16)
(2.16)
Тепер, задаючись значеннями![]() від
від ![]() до
до ![]() , необхідно визначити значення обертаючого
моменту за формулою Клосса. При цьому зауважимо, що на частині залежності
, необхідно визначити значення обертаючого
моменту за формулою Клосса. При цьому зауважимо, що на частині залежності![]() , яка відповідає стійким режимам роботи
двигуна
, яка відповідає стійким режимам роботи
двигуна ![]() , достатньо мати чотири точки при
, достатньо мати чотири точки при
![]()
![]()
![]()
![]()
На ділянці залежності ![]() з нестійкими режимами роботи двигуна (
з нестійкими режимами роботи двигуна (![]() ) можна задатися такими значеннями ковзання
) можна задатися такими значеннями ковзання
![]() . Результати розрахунку зведено до
табл.2.1.
. Результати розрахунку зведено до
табл.2.1.
Пусковий момент двигуна визначається
при ![]() і дорівнює
і дорівнює ![]() , тоді
кратність цього моменту
, тоді
кратність цього моменту
 (2.17)
(2.17)
Таблиця 2.1 - Дані розрахунку
залежності ![]()
|
|
0 |
|
0,1 |
|
0,3 |
0,4 |
0,6 |
0,8 |
1,0 |
|
|
0 |
96,62 |
122,44 |
192,72 |
192,24 |
180,83 |
147,39 |
119,85 |
99,78 |
За даними таблиці 2.1. на рис.2.4
зображено залежність ![]() .
.
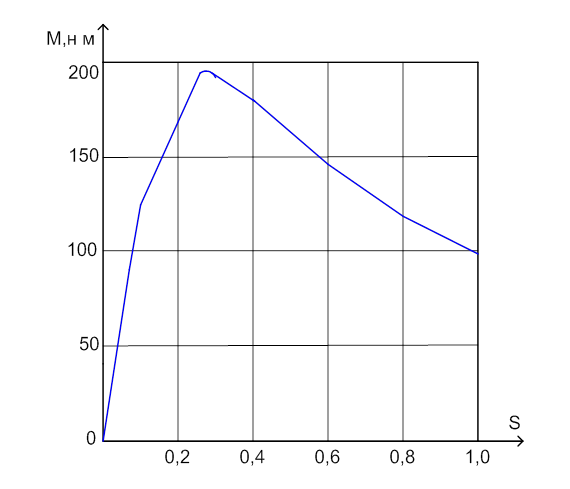
Рисунок 2.4 - Графік залежності ![]()
Природну механічну характеристику ![]() при
при ![]() отримуємо
шляхом окремих розрахунків частоти обертання і обертаючого моменту на основі
виразів, у які входить один аргумент – ковзання
отримуємо
шляхом окремих розрахунків частоти обертання і обертаючого моменту на основі
виразів, у які входить один аргумент – ковзання ![]() :
:
 ;
(2.18)
;
(2.18)
 (2.19)
(2.19)
Тепер, щоб отримати природну
механічну характеристику, достатньо задати ряд значень ![]() від
від
![]() до
до ![]() і
виконати розрахунки за наведеними формулами. Значення ковзання
і
виконати розрахунки за наведеними формулами. Значення ковзання ![]() для механічної характеристики вибирається
таким же чином, як і для залежності
для механічної характеристики вибирається
таким же чином, як і для залежності ![]() . У тому числі, завжди
треба робити розрахунок для значень ковзання
. У тому числі, завжди
треба робити розрахунок для значень ковзання ![]() і
і ![]() .
.
Результати розрахунку зведено до
табл.2.2, де ще додано значення ![]() , яке визначається далі
(
, яке визначається далі
(![]() важливо для однієї з штучних
характеристик).
важливо для однієї з штучних
характеристик).
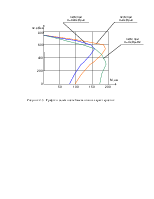
За даними табл.2.2 на рис. 2.5
зображено природну механічну характеристику ![]() при
при ![]() .
.
Щоб отримати штучну механічну
характеристику при зниженні напруги живильної мережі на ![]() %,
тобто
%,
тобто ![]() , скористаємося таким ж формулами, що і в
попередньому випадку для природної механічної характеристики. Але при цьому
треба враховувати те, що максимальний обертаючий момент змінюється у залежності
від цієї напруги таким чином
, скористаємося таким ж формулами, що і в
попередньому випадку для природної механічної характеристики. Але при цьому
треба враховувати те, що максимальний обертаючий момент змінюється у залежності
від цієї напруги таким чином
 (2.20)
(2.20)
Тобто штучну механічну характеристику
при таких умовах визначаємо для тих же значень ковзання ![]() і
частоти обертання
і
частоти обертання ![]() , розраховуючи обертаючий момент
за формулою
, розраховуючи обертаючий момент
за формулою
 (2.21)
(2.21)
(як відомо, значення ![]() не залежить від величини напруги
живлення).
не залежить від величини напруги
живлення).
Результати розрахунків зведено до табл.. 2.2.
За даними табл. 2.2 на рис. 2.5
зображено штучну механічну характеристику ![]() при
при ![]() .
.
Ця і попередня механічні
характеристики отримані при умові, що фази обмотки ротора мають тільки свій
активний опір![]() , тобто немає ніяких додаткових опорів
, тобто немає ніяких додаткових опорів ![]() .
.
Таблиця 2.2 – Дані розрахунку механічних характеристики асинхронного двигуна
|
|
0 |
0,075 |
0,1 |
0,2 |
0,279 |
0,4 |
0,558 |
0,6 |
0,8 |
1,0 |
|
|
750 |
694 |
675 |
600 |
541 |
450 |
332 |
300 |
150 |
0 |
|
при
|
0 |
96,63 |
122 |
185 |
192,7 |
181 |
154 |
147 |
120 |
100 |
|
при
|
0 |
78,26 |
99 |
148 |
156 |
147 |
125 |
120 |
97 |
81 |
|
при
|
0 |
50,88 |
67 |
122 |
154 |
183 |
192,7 |
192 |
181 |
164 |
Щоб отримати штучну механічну
характеристику при введенні у фази обмотки ротора регулювальних реостатів з
опорами ![]() , скористаємося такими ж формулами, що і у
випадку для природної механічної характеристики. Але при цьому треба врахувати
те, що тепер змінюється критичне ковзання, яке взагалі визначається за відомою
формулою
, скористаємося такими ж формулами, що і у
випадку для природної механічної характеристики. Але при цьому треба врахувати
те, що тепер змінюється критичне ковзання, яке взагалі визначається за відомою
формулою  .
.
Тому, при додаванні до ![]() ще регулювального реостата з опором
ще регулювального реостата з опором ![]() та збереженні індуктивного опору фази
обмотки статора
та збереженні індуктивного опору фази
обмотки статора ![]() , складемо пропорцію і отримаємо
нове значення критичного ковзання для штучної механічної характеристики, що
розглядається, тобто
, складемо пропорцію і отримаємо
нове значення критичного ковзання для штучної механічної характеристики, що
розглядається, тобто
 (2.22)
(2.22)
Максимальний обертаючий момент ![]() не залежить від
не залежить від ![]() та
та
![]() і зберігається таким, що і для природної
механічної характеристики (його тепер буде отримано при новому значенні
критичного ковзання
і зберігається таким, що і для природної
механічної характеристики (його тепер буде отримано при новому значенні
критичного ковзання ![]() ). Ця штучна механічна
характеристика розраховується при напрузі живлення
). Ця штучна механічна
характеристика розраховується при напрузі живлення ![]() .
.
Таким чином, штучну механічну характеристику
при визначених умовах ![]()
![]() отримуємо
для тих же значень ковзання
отримуємо
для тих же значень ковзання ![]() і частоти обертання
і частоти обертання ![]() , що і в попередніх випадках, розраховуючи
обертаючий момент за модифікованою формулою
, що і в попередніх випадках, розраховуючи
обертаючий момент за модифікованою формулою
 (2.23)
(2.23)
Результати розрахунків зведені до табл.2.2.
За даними табл.2.2 на рис. 2.5
зображено штучну механічну характеристику ![]() при
при ![]() і
і ![]() .
.
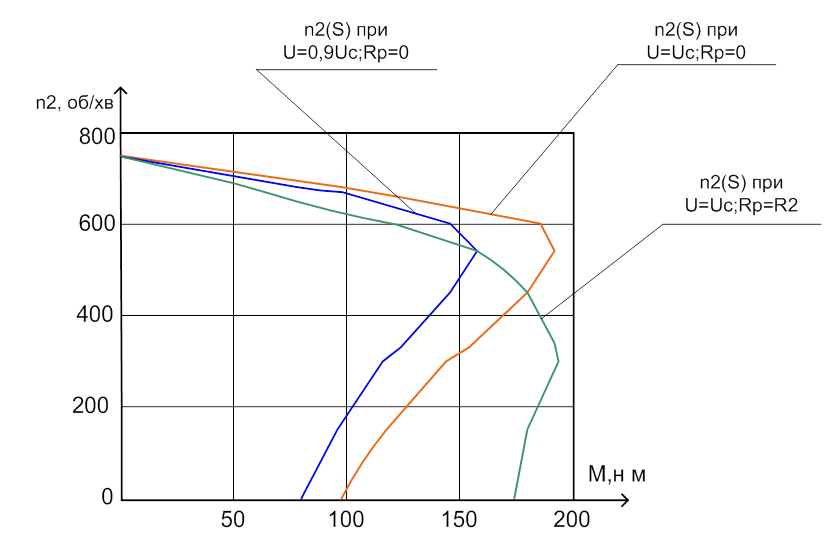
Рисунок 2.5 - Графіки залежностей механічних характеристик
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.