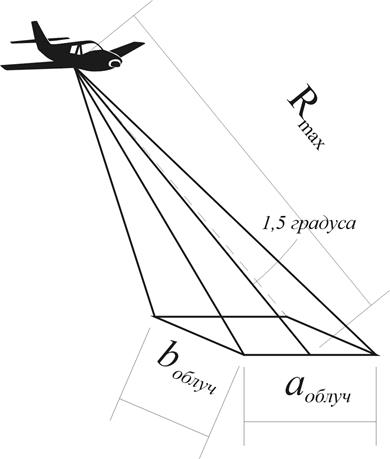
 Определим эффективную поверхность рассеяния
(ЭПР). Площадь пятна на земной поверхности, которое получается вследствие облучения
лучом антенны, найдем следующим образом:
Определим эффективную поверхность рассеяния
(ЭПР). Площадь пятна на земной поверхности, которое получается вследствие облучения
лучом антенны, найдем следующим образом:
![]() , где
, где  горизонтальный размер пятна;
горизонтальный размер пятна;
![]() продольный размер пятна;
продольный размер пятна;
![]() коэффициент
рассеяния антенны от поверхности земли.
коэффициент
рассеяния антенны от поверхности земли.
Подставив численные значения найдем ЭПР:
![]()
Подставив численные данные в уравнение (3) и решив его, относительно
![]() с учетом затухания в атмосфере, получим
следующее:
с учетом затухания в атмосфере, получим
следующее:

Приёмник построим по супергетеродинной схеме, причём сигнал подается непосредственно на балансный смеситель, снижающий уровень шума, создаваемый гетеродином. Второй сигнал на смеситель подается от гетеродина на отражательном клистроне низковольтного типа с заземлённым катодом. Сигнал промежуточной частоты образуется на настроенном контуре, на входе УПЧ. Коэффициент шума УПЧ определяется исключительно первым каскадом усилителя. Поэтому цепь УПЧ разделим на две части: предварительный усилитель, рассчитанный на получение малого коэффициента шума (с коэффициентом усиления порядка 20 дБ), совмещенный со смесителем и основной усилитель (с коэффициентом усиления порядка 100 дБ).
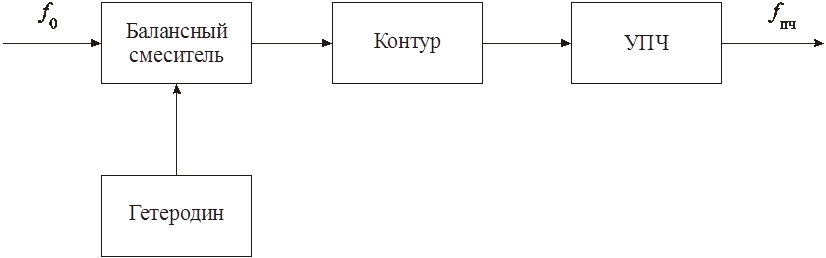
Рис. 6.1. Структурная схема приёмника.
Определим скважность импульсов:

Подсчитаем среднюю мощность:

Наш приёмник должен обеспечивать прием эхо-сигналов приходящих как с максимальной дальности Rmax, так и с минимальной Rmin.
Руководствуясь рекомендациями из книги под ред. М.
Сколника «Справочник по радиолокации», минимальную дальность возьмём порядка
1000 м. Предусмотрим бланкирование приёмника на времена задержки меньше
минимального. Используя уравнение радиолокации, посчитаем динамический диапазон
входных сигналов ![]() .
.
![]() минимальная дальность до цели.
минимальная дальность до цели.
![]() мощность передатчика для определения цели
на дальней границе зоны действия РЛС.
мощность передатчика для определения цели
на дальней границе зоны действия РЛС.

Такая максимальная мощность, которая может быть подана на вход приемника.

Из-за большого динамического диапазона, необходимо применить высоко эффективную автоматическую регулировку усиления (АРУ).
В приёмнике будем использовать УПЧ с логарифмической проходной характеристикой. Преимуществом логарифмического усилителя является то, что помехи обусловленные отражением от земной поверхности и атмосферных осадков, и шумовые флуктуации независимо от их абсолютной величины могут быть сведены в результате логарифмической обработки к постоянной флуктуации вокруг некоторого среднего значения. Средний уровень шума будет естественно постоянным. Этот средний уровень и его изменения уменьшим с помощью фильтра верхних частот (дифференцирующей схемы), который включается в цепь видеочастоты после логарифмического усилителя, в результате чего уровень помех получается на индикаторе постоянным и одинаковым [3].
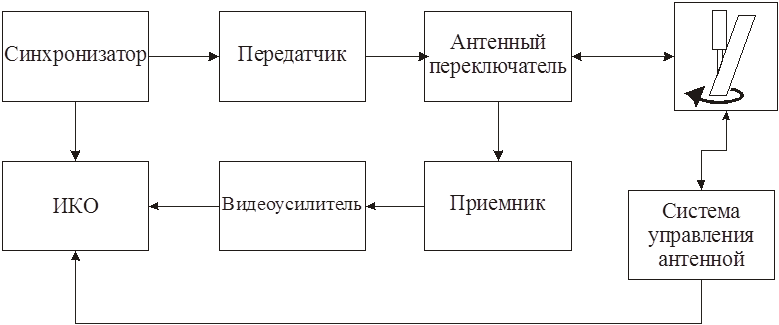
Рис. 7.1. Структурная схема разработанной РЛС.
8. Импульсный метод измерения дальности.
В состав импульсного радиолокационного дальномера входят синхронизатор, передатчик, антенный переключатель (АП), антенна, приемник и оконечное устройство (рис. 8.1, а). Синхронизатор вырабатывает последовательность видеоимпульсов для синхронизации передатчика и оконечного устройства (1 на рис. 8.1, б). Передатчик формирует импульсные высокочастотные колебания, которые могут быть модулированы или манипулированы по фазе или частоте в пределах каждого импульса по некоторому закону (2 на рис. 8.1, б). Высокочастотные импульсы передатчика через антенный переключатель поступают в антенну и излучаются в пространство.
Если в зоне облучения имеется цель, то эта цель отражает (пере- излучает) сигналы передатчика. Отраженные (переизлученные) сигналы принимаются антенной и через антенный переключатель поступают на вход приемника. С выхода приемника видеоимпульсы цели подаются в оконечное устройство дальномера, где производится измерение времени запаздывания этих импульсов относительно зондирующих сигналов передатчика (3 на рис. 8,1, б). Антенный переключатель служит для запирания приемника во время излучения зондирующих импульсов и для блокировки выходных цепей передатчика во время приема сигналов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.