а). ![]()
![]()
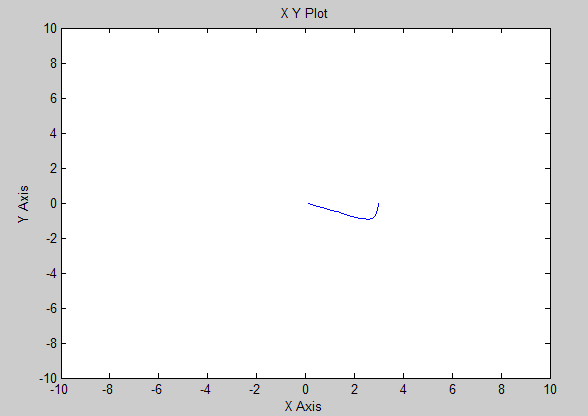 Рис. Фазовый
портрет
Рис. Фазовый
портрет
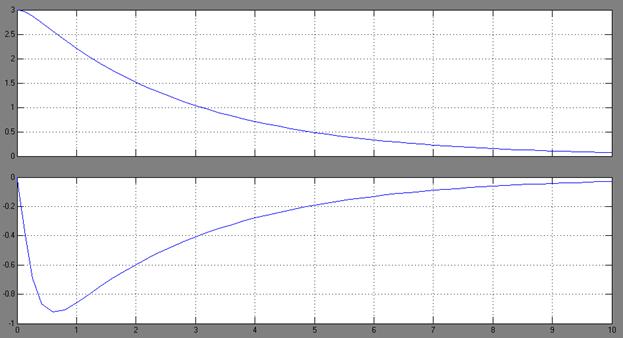
Рис. ![]() и
и ![]()
б). ![]()
![]()
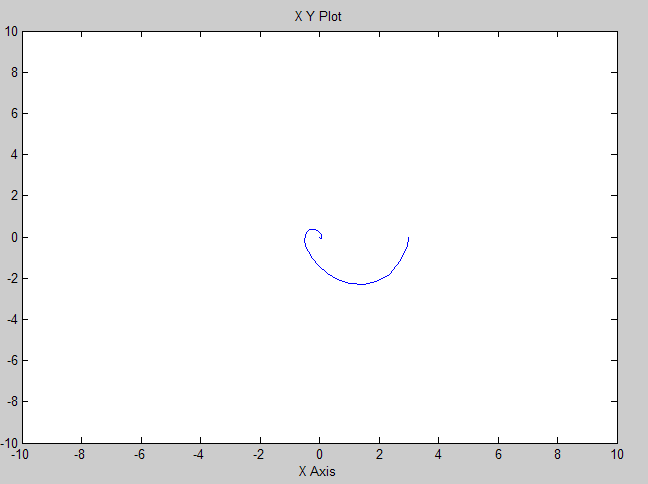
Рис. Фазовый портрет
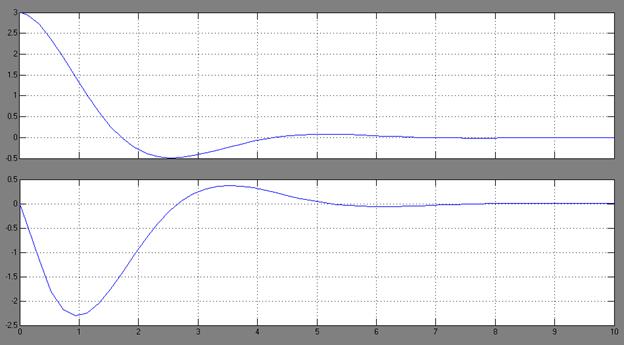
Рис. ![]() и
и ![]()
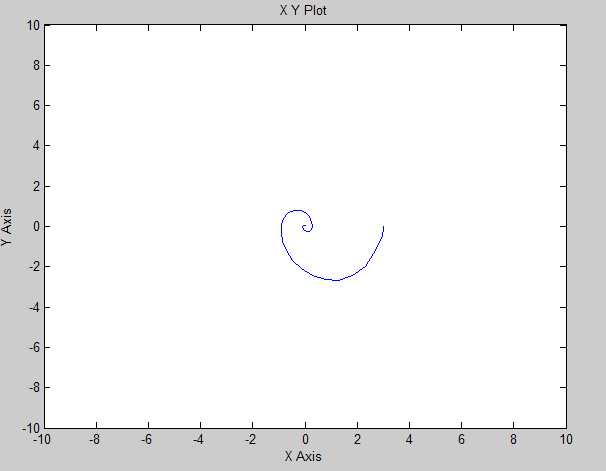
Рис. Фазовый портрет
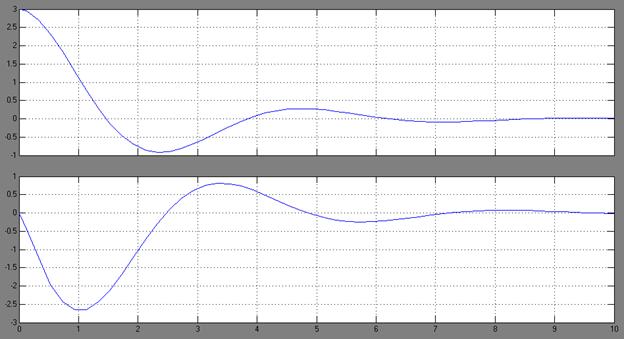
Рис. ![]() и
и ![]()
Рассмотрим случай, когда ![]()
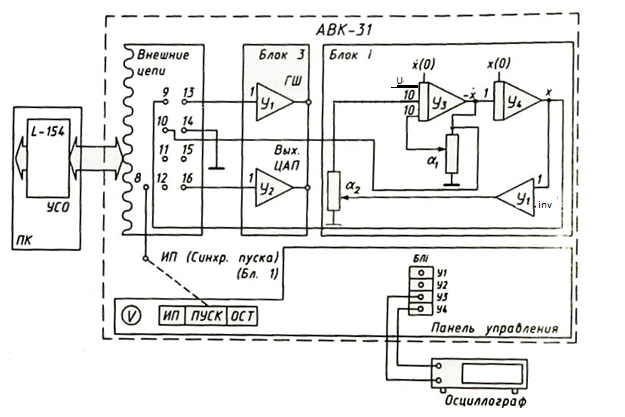
Рис. Схема набора
Автоколебания в системе будут
происходить с такой же частотой, что и в первом случае, поэтому ![]() с.
с.
Смоделируем эту систему в matlab. Схема моделирования показана на рисунке.
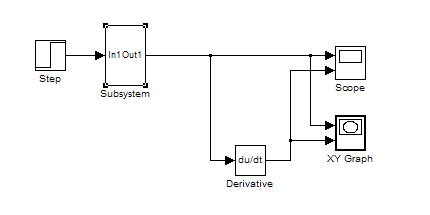
Здесь необходимо учесть, что верхнее значение сигнала в блоке step нужно указать 3.
В результате получили следующее:
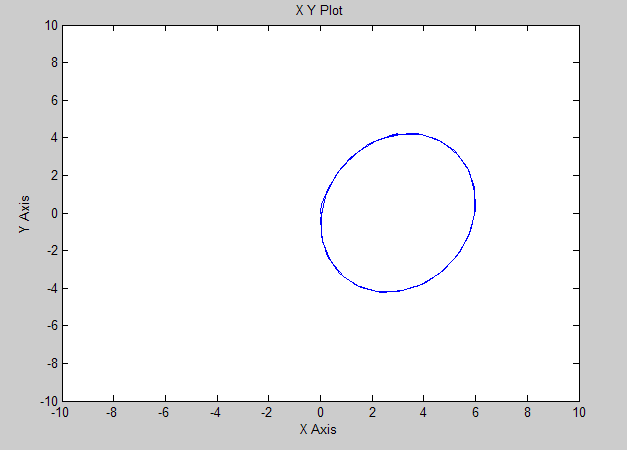
Рис. Фазовый портрет
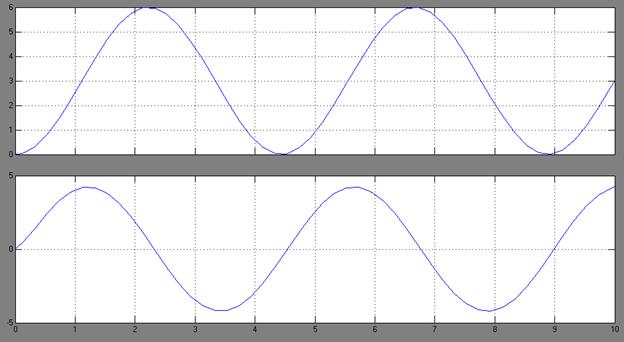 Рис.
Рис. ![]() и
и ![]()
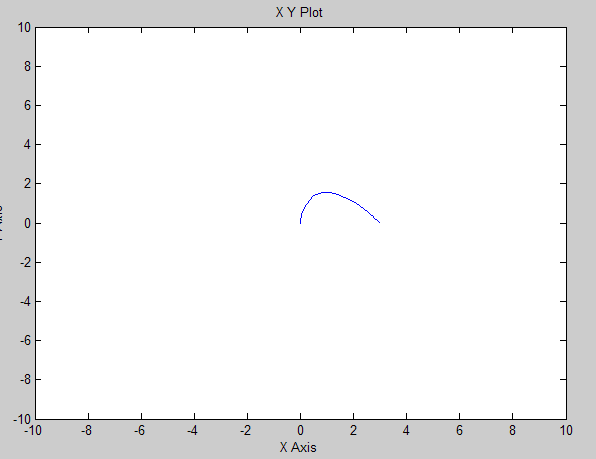
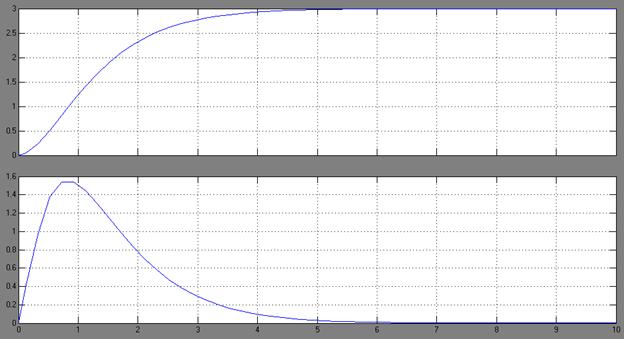
Рис. ![]() и
и ![]()
3.
Аналогичные графики построим для коэффициента ![]() и
и
![]() .
.
а). ![]() = 5.66
= 5.66
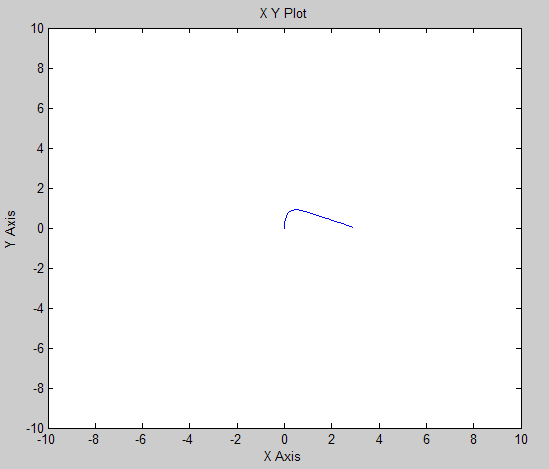
Рис. Фазовый портрет
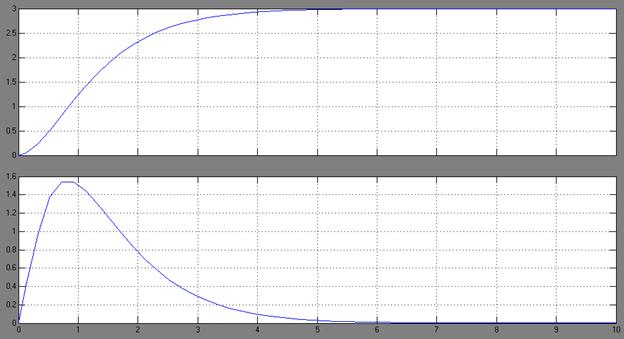
Рис. ![]() и
и ![]()
б). ![]()
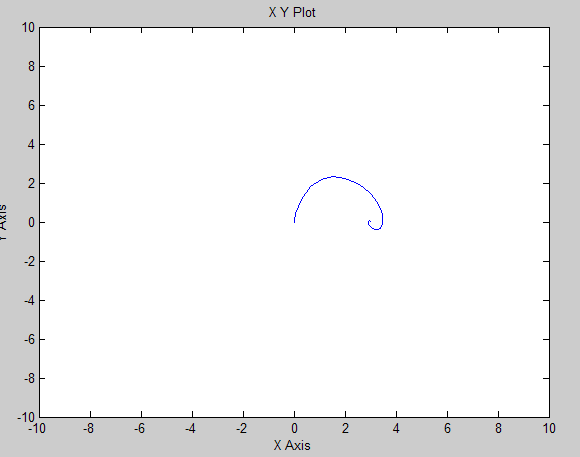
Рис. Фазовый портрет
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.