Санкт-Петербургский государственный политехнический университет
Факультет технической кибернетики
Кафедра компьютерных систем и программных технологий
по лабораторной работе №1
Моделирование объектов систем
компьютерного управления;
сбор и фиксация результатов моделирования.
Выполнил студент гр. 4081/1 Хромов И.Б
Проверил: Нестеров С.А
Санкт-Петербург
2010
Цели работы:
Теоретическая часть.
В основе моделирования на АВК систем второго порядка лежит теория подобия: похожие физические процессы описываются одинаковыми уравнениями. Точность моделирования определяется степенью подобия. Использование для моделирования АВМ имеет ряд преимуществ: высокое быстродействие, наблюдение в темпе процесса любого числа составляющих в соответствующем масштабе времени. Основным решающим элементом в АВК является операционный усилитель. На первом этапе моделирования составляется схема набора. На втором этапе решается задача количественного подобия, т.е. устанавливаются зависимости между исходными и машинными переменными.
Схема эксперимента.
Рассматривается моделирование объекта, заданного линейным дифференциальным уравнением второго порядка.
![]()
Рассмотрим случай, когда ![]()
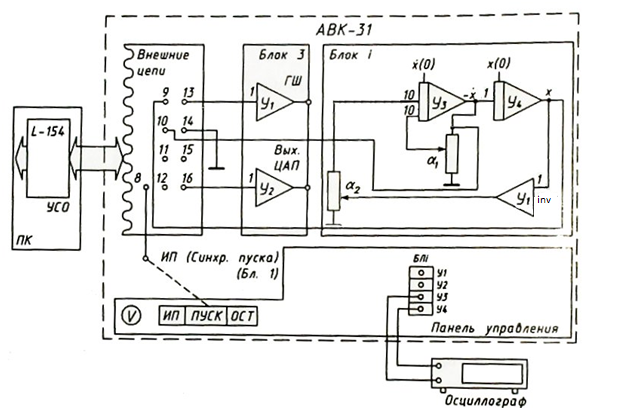
Рис. Схема набора.
Так как отсутсвует коэффициент a1, в системе будут незатухающие автоколебания. Частота
автоколебаний находится как ![]() . Соответсвенно
период
. Соответсвенно
период ![]() с.
с.
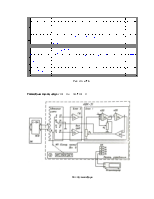
Смоделируем эту систему в matlab.
Схема моделирования показана на рисунке.
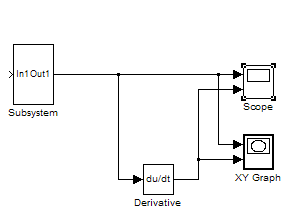
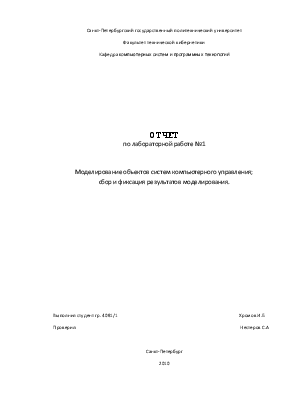
В результате получили следующее:
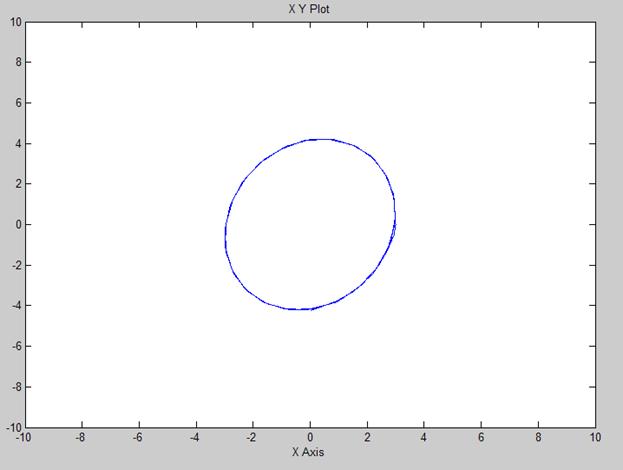
Рис. Фазовый портрет
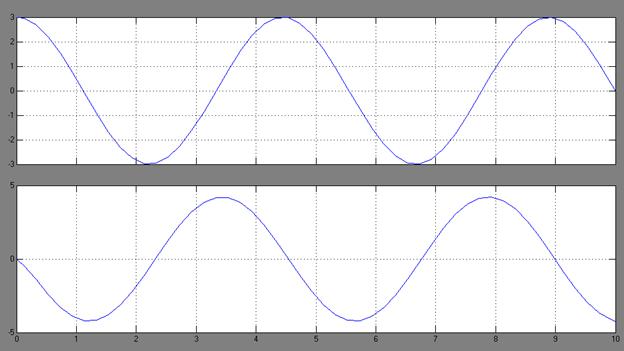
Рис. ![]() и
и ![]()
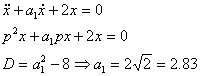
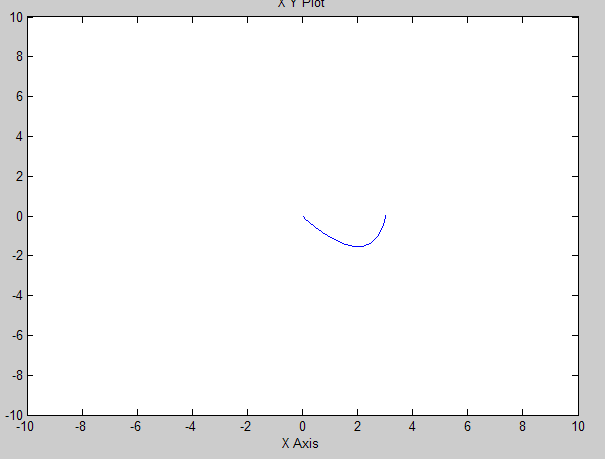
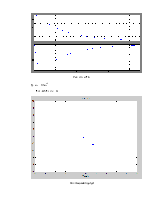
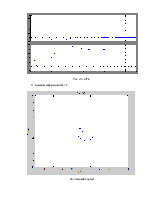
Рис. Фазовый портрет
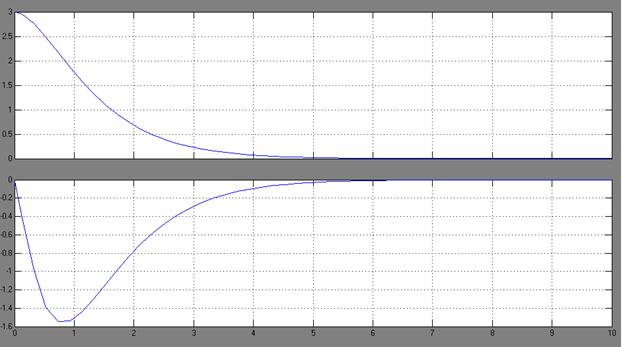
Рис. ![]() и
и ![]()
3.
Аналогичные графики построим для коэффициента ![]() и
и
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.