Цель работы: научиться рассчитывать пусковые и тормозные сопротивления и осуществлять автоматический пуск и торможение двигателя постоянного гока независимого возбуждения (ДПТНВ) в функциях скорости, тока и времени.
Программа работы
1. Ознакомиться с электрооборудованием лабораторного стенда.
2. Рассчитав пусковые и тормозные сопротивления. '
3. Собрать и испытать схемы автоматического управления пуском и торможением ДПТНВ.
Краткие теоретические сведения
Прежде чем испытать схемы управления, необходимо рассчитать пусковые и тормозные сопротивления.
Естественные механические и электромеханические характеристики ДПТНВ двигательных и тормозных режимов достаточно жестки, поэтому пусковые значения токов и моментов могут достигать значительных величии, во много раз превосходящих их номинальные значения [1]. Ото вредно сказывается на работе двигателя и может привести к аварийным ситуациям (подгорание щеток в результате высокой плотности тока, выход из а роя обмоток якоря из-за больших электродинамических усилий, а также валов двигателя и рабочей машины из-за значительных моментов). Поэтому пуск и торможение двигателей осуществляются при включении в цепь якоря дополнительных сопротивлений, ограничивающих величины пусковых токов, а следовательно, и моментов.
Пуск такого двигателя производится при полном магнитном потоке, равном номинальному. Но мере разбега двигателя пусковое сопротивление плавно иди ступенчато (при помощи контактов КМ1, КМ2...КМm-1, КМm. как это показано на рис. 5.1) уменьшают, чтобы колебания токов поддерживались в заданных пределах.
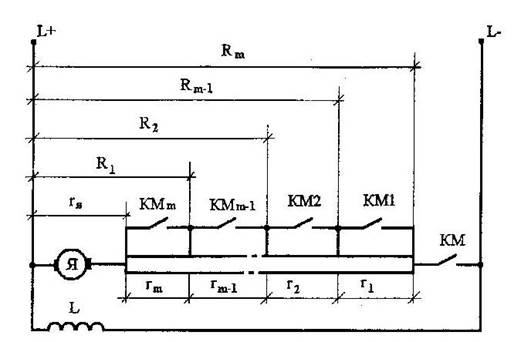
Рис. 1. Схема пуска ДПТНВ
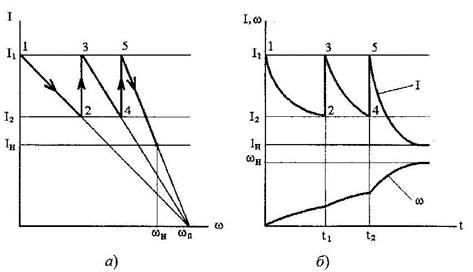
Рис. 2. Электромеханическая характеристика
а - нагрузочные характеристики; б - при пуске ДПТНВ с двухступенчатым пусковым реостатом
Количество пусковых сопротивлений т, а также пределы колебания токов или моментов при пуске зависят от требований, предъявляемых рабочей машиной к двигателю. Если рабочая машина допускает большие величины ускорений и существенное изменение их в период пуска, то пределы колебании токов могут быть значительными, а количество пусковых ступеней невелико. Для рабочих машин, требующих плавного нарастания скорости, необходимы малый диапазон колебаний пусковых токов или моментов и большое число пусковых ступеней. Максимальное значение тока I2 не должно превосходить величину, допустимую по условиям коммутации на коллекторе. Минимальный ток I1 должен быть больше рабочего тока двигателя, а если рабочий ток не известен - то больше номинального. Значения токов обычно принимают в следующих пределах:
 (5.1)
(5.1)
где IH—номинальный ток двигателя.
На рисунке 5.1 полное сопротивление якорной цепи во время пуска двигателя обозначено Rm, а сопротивление якорной цепи при выведенной первой ступени пускового реостата – Rm-1. Сопротивления первой, второй и последней из m ступеней пускового реостата – r1, r2… rm соответственно.
На рисунке 5.2 для примера показаны электромеханическая характеристика а и нагрузочные характеристики б при пуске ДПТНВ с двухступенчатым пусковым реостатом. Искусственная характеристика 1-2-4-ω0 соответствует наибольшему сопротивлению Rm., а характеристика 3-4- ω0 - сопротивлению Rm-1. После выключения всех ступеней пускового реостата двигатель переходит на естественную характеристику 5- ω0.
Ток в цепи якоря в точке 2
 (5.2)
(5.2)
где Em2 - ЭДС якоря в точке 2 характеристики при сопротивлении цепи якоря Rm.
Аналогично для точки 3
 (5.3)
(5.3)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.