Содержание
1. Задание на проектирование
2. Описание работы схвата
3. Расчет схвата
4. Расчет параметров элементов схвата
Задание на проектирование
Разработать схват манипулятора для роботизированного участка автоматизированной обработки заготовки на металлорежущем станке(автомате), в который она подаётся из магазина, устанавливается и снимается после обработки манипулятором. Согласно заданию необходимо составить кинематическую схему манипулятора . На основе кинематической схемы схвата и параметров заготовки разработать его конструкцию.
Станок токарный модели 1722; вес заготовки 5,5Н; диаметр 30мм; длинна 100мм. Предельная скорость подъема манипулятора 0,2 м/с. Максимальное перемещение манипулятора при подъёме 140мм. Величина перемещения при торможении руки 3мм. Предельная скорость выдвижения руки 0,5м/с.Величина перемещения при выдвижении руки 260мм. Предельная скорость поворота элементов манипулятора 50град/с. Путь торможения наиболее удалённой точки 4мм. Погрешность перемещения при торможении 0,5мм.
Описание работы схвата
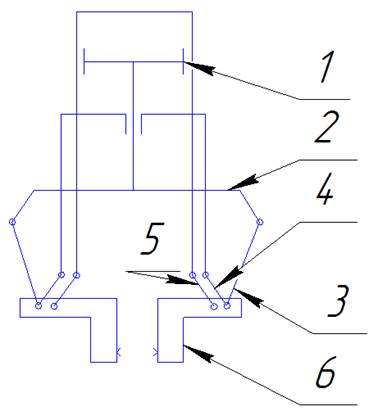 При подаче воздуха в
верхнюю полость пневмоцилиндра поршень 1 опускается вниз вместе с рычагом
2(жесткосоединённым со штоком пневмоцилиндра). Рычагам 4 и 5 через рычаг 3
передаётся усилие от рычага 2, и за счёт неподвижных опор опор рычаги 4 и 5
вращаются вокруг этих опор. Это вращение передается флажкам с губками и губки
сжимаются. При подаче воздуха в нижнюю полость пневмоцилиндра губки схвата
разжимаются.
При подаче воздуха в
верхнюю полость пневмоцилиндра поршень 1 опускается вниз вместе с рычагом
2(жесткосоединённым со штоком пневмоцилиндра). Рычагам 4 и 5 через рычаг 3
передаётся усилие от рычага 2, и за счёт неподвижных опор опор рычаги 4 и 5
вращаются вокруг этих опор. Это вращение передается флажкам с губками и губки
сжимаются. При подаче воздуха в нижнюю полость пневмоцилиндра губки схвата
разжимаются.
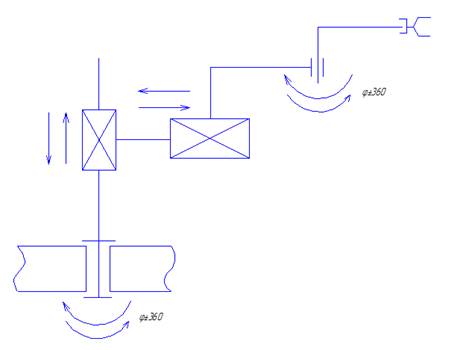
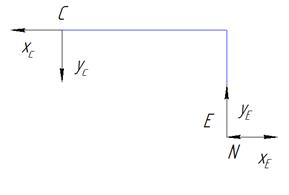
Кинематическая схема свата. Кинематическая
схема робота.
Расчёт схвата.
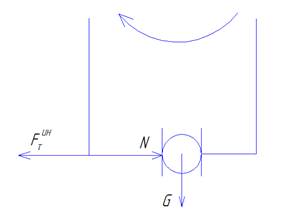
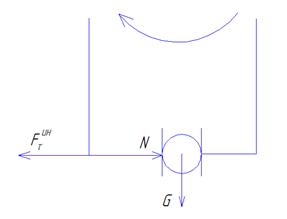
Пусть рука робота с постоянной скоростью движется вниз. Найдём условия надёжного закрепления заготовки.
Необходимое условие закрепления заготовки.
![]()
![]()
![]()
Т.к считаем движение равнозамедленным

Находим силу зажима необходимую для того что бы деталь не вырвалась из схвата.
![]() , где к
= 1,5; f = 0,13
, где к
= 1,5; f = 0,13

Найдём диаметр поршня пневмоцилиндра необходимый для надёжного удержания заготовки.
![]()
![]()
![]()
![]()





Выбираем по справочнику Дп = 80мм
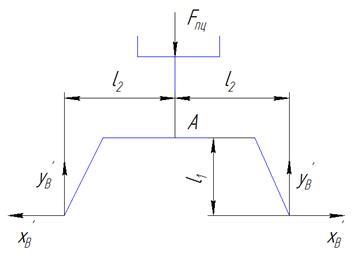
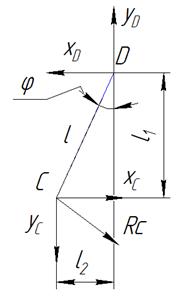
Пусть рука робота со схватом совершает вращение вокруг оси стойки робота.
Рассмотрим два случая:
1. Воздействие центробежной силы инерции на губку схвата.
![]()
![]()
R- расстояние от центра масс заготовки до оси вращения стойки.
![]()
2. В момент торможения.
![]()
![]()
Где ![]()
![]()
![]()
Расчёт параметров элементов схвата.
По справочнику находим соотношение
размеров поршня и штока пневмоцилиндра. Диаметр штока равен ![]() .
.
Найдём реакции в местах соединения элементов. Проверяем крепление поршня и штока на растяжение.
![]() ; где Р – сила действующая вдоль оси штока.
; где Р – сила действующая вдоль оси штока.
 см =22мм
см =22мм
Найденного по справочнику сечения штока достаточно.
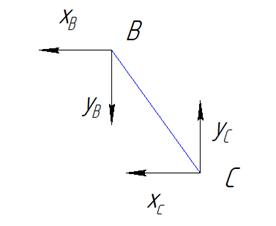
Найдём реакции в опорах схвата.

![]()
![]()
![]()
Рассмотрим следующий обьект равновесия.

Рассмотрим третий объект равновесия.
![]()
![]()
![]()
![]()
Рассмотрим последний объект равновесия губки схвата.
![]()
![]()
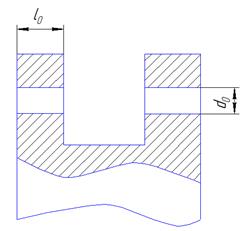
Находим диаметр осей, с помощью которых крепятся между собой рычаги из условия, чтобы их не срезало и не смяло.
![]() ; где Р – сила действующая поперёк
оси.
; где Р – сила действующая поперёк
оси.
Проверяем на смятие.
![]()
![]()
После проверки на срез и смятиевыбираем оси диаметром 3,5мм.
Проверим на напряжение растяжения сечение рычагов.
![]()
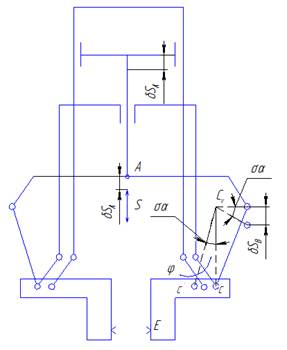
Найдём погрешность силы прижатия
в зависимости от точности изготовления элементов схвата и изменения давления в
полости пневмоцилиндра от [0,3…0,5 кгс/с![]() ]
]
![]()
Воспользуемся методом линейных ошибок
![]()
![]() – допустимое изменение давления в
пневмоцилиндре.
– допустимое изменение давления в
пневмоцилиндре.




![]()
![]()

![]()
После расчета погрешности усилия зажима мы установили, что с учётом этой погрешности найденный диаметр поршня пневмоцилиндра обеспечит необходимое усилие зажима.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.