
Курсовой проект (нн/нн)
Решение:
Примечание (не писать!). Поскольку никаких [м/ук] БелГУТа по выполнению данного проекта пока не наблюдается, а я предпочитаю выполнять работы в соответствии с [м/ук] конкретного учебного заведения, то работа выполнена по аналогии с [м/ук № 3834] БелГУТа.
Содержание
Содержание. 1
Задание на расчёт и исходные данные. 1
1 Структурный и кинематический анализ плоского рычажного механизма. 1
1.1 Структурный анализ плоского рычажного механизма. 1
1.1.1 Характеристика звеньев механизма. 1
1.1.2 Характеристика кинематических пар. 1
1.1.3 Число степеней свободы механизма. 2
1.2 Кинематический анализ механизма методом планов скоростей и ускорений. 3
1.2.1 Построение планов положений. 3
1.2.2 Построение планов скоростей. 4
1.3 Кинематический анализ механизма методом диаграмм.. 6
1.4 Построение плана ускорений механизма для исследуемого положения и определение угловых ускорений звеньев. 6
1.5 Оценка точности полученных результатов. 7
2 Динамический анализ механизма. 8
2.1 Определение сил, приложенных к звеньям механизма. 8
2.2 Определение величины уравновешивающей силы методом Н.Е. Жуковского. 8
2.3 Расчёт величины уравновешивающего момента и потребной мощности двигателя в исследуемом положении механизма. 9
Задание на расчёт и исходные данные
 Таблица 1 — Исходные данные.
Таблица 1 — Исходные данные.
|
Величина |
Значение |
||||
|
Угловая скорость входного звена |
w2 = 2 рад/с |
||||
|
Внешний (полезный) момент |
Мпс = 900 Н∙м |
||||
|
Размеры звеньев, мм |
|||||
|
lAE |
lAB |
lAD |
lBH |
lEF |
|
|
0.1 |
0.057 |
0.2 |
0.03 |
0.285 |
|
|
Погонный вес звеньев |
q = 100 Н/м. |
||||
Масса камня равна массе кулисы.
Таблица 2 — Таблица звеньев
|
№ п/п |
№ звена |
Наименование звена |
Характер движения звена |
|
1 |
0 |
стойка |
неподвижно |
|
2 |
1 |
кривошип |
вращательное |
|
3 |
2 |
коромысло-кулиса |
вращательное, возвратное |
|
4 |
3 |
шатун-ползушка |
сложное плоскопараллельное |
|
5 |
4 |
шатун |
сложное плоскопараллельное |
|
6 |
5 |
шатун-ползушка |
сложное плоскопараллельное |
Всего звеньев механизма — k = 6, подвижных звеньев — n = 5.
Таблица 3 — Таблица кинематических пар
|
№ п/п |
Обозначение |
Номера звеньев, образующих пару |
Наименование |
Класс пары |
|
1 |
А |
0–1 |
вращательная |
V |
|
2 |
В |
1–3 |
вращательная |
V |
|
3 |
С |
2–3 |
поступательная |
V |
|
4 |
D |
2–0 |
вращательная |
V |
|
5 |
E |
1–4 |
вращательная |
V |
|
6 |
F |
4–5 |
вращательная |
V |
|
7 |
G |
2–5 |
поступательная |
V |
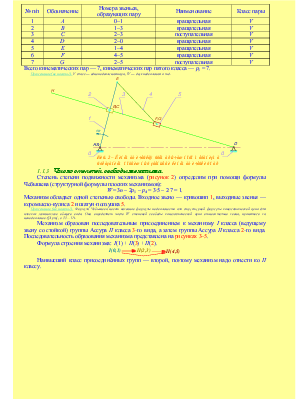
Всего кинематических пар — 7, кинематических пар пятого класса — р5 = 7.
Примечание (не писать!). V класс — одноподвижная пара, IV — двухподвижная и т.д.

Степень степени подвижности механизма (рисунок 2) определим при помощи формулы Чебышева (структурной формулы плоских механизмов):
W = 3n – 2р5 – р4 = 3∙5 – 2∙7 = 1.
Механизм обладает одной степенью свободы. Входное звено — кривошип 1, выходные звенья — коромысло-кулиса 2 и шатун-ползушка 5.
Примечание (не писать!). Формула Чебышева носит название формулы подвижности или структурной формулы кинематической цепи для плоских механизмов общего вида. Она определяет число W степеней свободы кинематической цепи относительно звена, принятого за неподвижное.([Арт], с. 35…41).
Механизм образован последовательным присоединением к механизму I класса (ведущему звену со стойкой) группы Ассура II класса 3-го вида, а затем группы Ассура II класса 2-го вида. Последовательность образования механизма представлена на рисунках 3–5.
Формула строения механизма: I(1) + II(3) + II(2).
![]()
Наивысший класс присоединённых групп — второй, поэтому механизм надо отнести ко II классу.
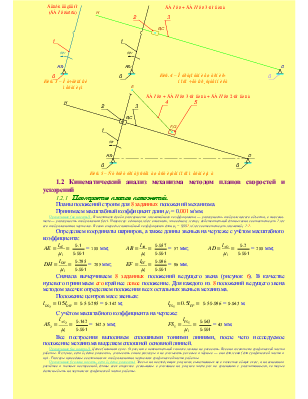
Планы положений строим для 8 заданных положений механизма.
Принимаем масштабный коэффициент длин ml = 0.001 м/мм.
Примечание (не писать!). В числителе дроби размерности масштабного коэффициента — размерность изображаемого объекта, в знаменателе — размерность изображения (мм). Например: единица м/мм означает, что одному метру действительной длины звена соответствует 1 мм его изображения на чертеже. В свою очередь масштабный коэффициент длин ml = 0,001 м/мм соответствует масштабу 1:1.
Определяем координаты шарниров, а также длины звеньев на чертеже с учётом масштабного коэффициента:
|
|
|
|
|
|
|
Сначала вычерчиваем 8 заданных положений ведущего звена (рисунок 6). В качестве нулевого принимаем его крайнее левое положение. Для каждого из 8 положений ведущего звена методом засечек определяем положения всех остальных звеньев механизма.
Положение центров масс звеньев:
|
|
|
С учётом масштабного коэффициента на чертеже:
|
|
|
Все построения выполняем сплошными тонкими линиями, после чего исследуемое положение механизма выделяем сплошной основной линией.
Примечание (не писать!). Далее (начиная с рис. 6) рисунки в пояснительной записке можно не рисовать. Все они имеются в графической части работы. В случае, если будете рисовать, указывать синие размеры и не указывать розовые и чёрные — они для меня (для графической части и пр.). Размеры приведены в величинах их изображения на чертежах графической части работы.
Примечание (можно писать, если будете рисовать) Здесь и на последующих рисунках, выполненных не в качестве общих схем, а на основании расчётов и точных построений, длины всех отрезков уменьшены в указанное на рисунке число раз по сравнению с рассчитанными, которые должны быть на чертежах графической части работы.
Планы скоростей строим для 8 заданных положений механизма.
По заданным значениям угловой скорости кривошипа ω1 и его длине
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.