М – возмущение.
Объект управления представляет собой усилитель мощности, электрический нагреватель, бак с водой и термопару. Более детальная схема изображена на рис.2.2, где пунктирной линией выделен объект управления.
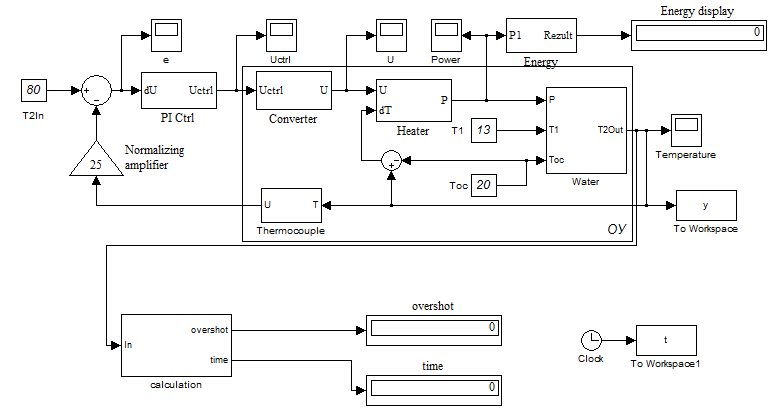
Рис. 2.2. Модель системы стабилизации
Для согласования выхода термопары и уставки по температуре, используется блок «Normalizingamplifier». Так как термопара имеет линейную характеристику, и при измеряемой температуре равной в 80 °С на выходе ей соответствует напряжение в 3,2 мВ, блок представляет собой усилитель.
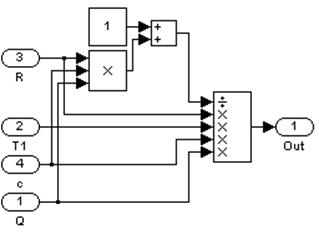
Блок «Heater» является моделью ТЭНа (рис.2.3), который обеспечивает требуемую электрическую мощность для нагрева воды. Мгновенное значение греющих потерь, обусловленных протеканием токов в тэнах, определяется в соответствии с законом Джоуля-Ленца, с учетом изменения сопротивления нагревателей по мере повышения их температуры.
Закон изменения сопротивлений:
![]()
где ![]() –
омические сопротивления тэнов в холодном и нагретом состояниях;
–
омические сопротивления тэнов в холодном и нагретом состояниях;
![]() – термический коэффициент материала
тэна;
– термический коэффициент материала
тэна;
![]() - превышение температуры нагревателей
над температурой окружающей среды (перегрев).
- превышение температуры нагревателей
над температурой окружающей среды (перегрев).
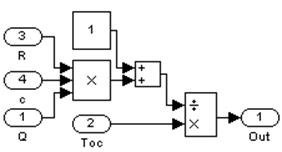
Блок «Converter» (рис. 2.4) является моделью усилителя мощности на основе MOSFET-транзисторов. Такой усилитель будет представлять собой импульсный усилитель с линейной характеристикой.
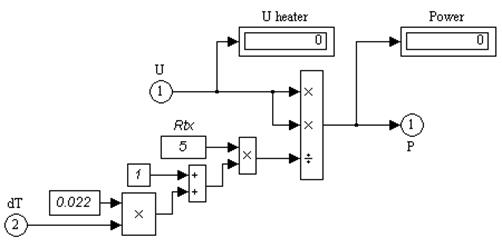
Рис.2.3. Блок-схема нагревателя
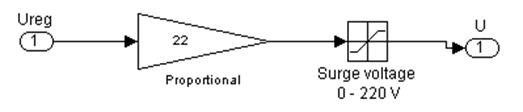
Рис.2.4. Блок-схема усилителя
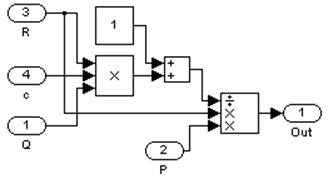
Блок «Water» (рис.2.5) представляет собой модель резервуара с водой, блоки k1, k2, k3, tпредставлены на рис.2.6.
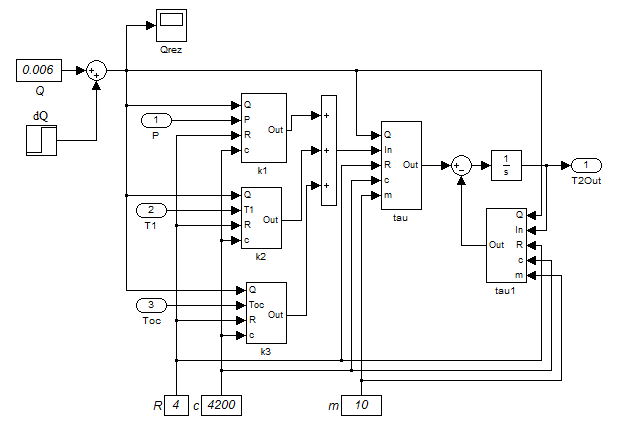
Рис.2.5. Блок-схема модели резервуара с водой
|
а) |
б) |
|
в) |
г) |
|
Рис.2.6. Блоки а) k1, б) k2, в) k3, г) t |
|
Так как электрокалорифер есть объект с самовыравниванием и не требует высокой скорости переходного процесса, регулирующее устройство было выбрано как ПИ-регулятор (рис.2.7):
![]() .
.
Значения коэффициентов усиления kp, kiрассчитывается на основании требования управления системы стабилизации. Ресурс управления всегда ограничен, следовательно, необходим ограничитель выходного напряжения регулятора.
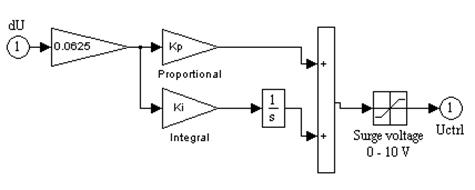
Рис. 2.7. Блок-схема ПИ-регулятора
Значение kбыло выбрано равным 0,0625, для того, чтобы рассогласование
температуры в 80 градусов соответствовало напряжению в 5 В . А так как по
заданию ресурс управления система имеет двойной – ограничитель ставиться на 10
В. Отсюда регулятор работает в диапазоне от 0 до 10 В.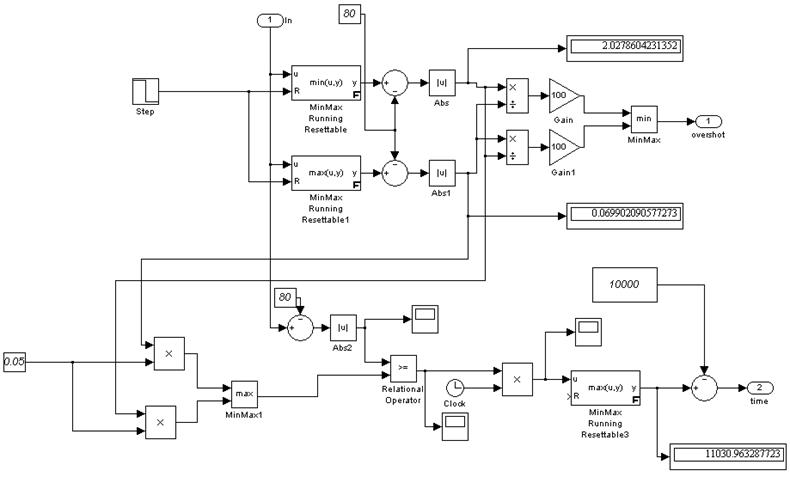
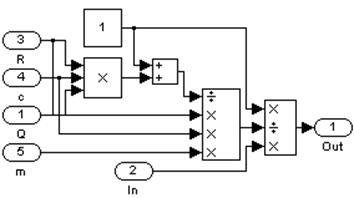
Рис. 2.8. Блок «calculation».
Блок «calculation» (рис.2.8) используется для получения численных значений времени переходного процесса и перерегулирования по возмущению.
2.2. Целевая функция и методология параметрического синтеза
Система стабилизации воды в электрокалорифере состоит из объекта управления и регулятора, параметры которого необходимо настроить в соответствии с заданными показателями качества работы системы – времени переходного процесса и перерегулирования.
Весьма удобным для параметрического синтеза устройств и систем автоматики представляется использование симплекс - планирования.
Симплексный метод позволяет совмещать пробные опыты для определения направления движения с рабочим движением по поверхности отклика к области оптимума. В качестве настроечных параметров используются коэффициенты ПИ-регулятора. Для реализации симплекс метода необходимо сформировать целевую функцию для получения обобщенного показателя качества системы, который будет использован как критерий оптимизации. Для системы управления существенны показатели перерегулирования (не более 5%) и условие минимума расхода энергии на достижение сигнала задания, т.е. время переходного процесса должно быть минимальным[2].
Для поиска оптимальных параметров настройки ПИ-регулятора используется функция желательности Харрингтона.
В качестве параметров в функцию Харрингтона введены значения максимального отклонения температуры от заданного значения и потребление энергии на отработку возмущения. Обобщенная функция желательности Dищется как средняя геометрическая от частных значений d:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.