МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ
УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автоматики
Лабораторная работа №2
Стабилизация трехмассовой системы: модальный метод синтеза в пространстве состояний с наблюдателем пониженного порядка
Факультет: АВТ
Группа: АА-86с
Студенты: Лядов А.Д.
Сапрыкин О.Н.
Вариант: 2
Дата сдачи:
Отметка о защите:
Преподаватель:
Воевода А.А.
Новосибирск, 2012
Цель работы
Исследование двухканальной системы, состоящей из трех масс, с помощью модального метода синтеза с наблюдателем пониженного порядка.
Исходные данные
Таблица 1.
|
m1 |
m2 |
m3 |
k1 |
k2 |
k3 |
d1 |
d2 |
d3 |
|
1 |
1 |
1 |
2 |
2 |
4 |
0 |
0 |
0 |
Ход работы
Модель объекта

Найдем описание объекта в пространстве состояний, для чего вторые производные оставим слева, перейдем к изображениям, разделим на s2 и сгруппируем члены по степеням s:
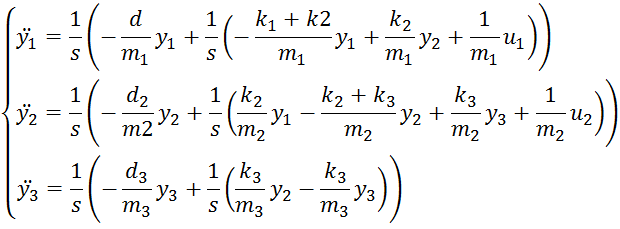
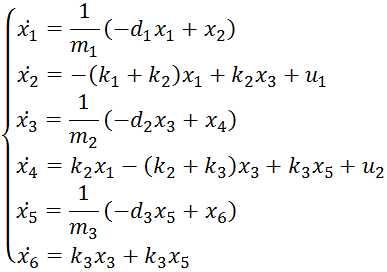
Каждое уравнение можно представить в виде двух интеграторов, соединенных слева направо: обозначим выход правого интегратора первого уравнения через x1 , что соответствует содержимому внешней скобки, и через x2 выход первого интегратора, что соответствует содержимому внутренней скобки. Аналогичные обозначения введем для второго и третьего уравнений. При данных обозначениях оказывается, что y1=x1 и y2=x3.
Описание объекта в пространстве состояний следующее:
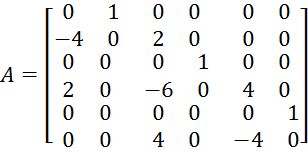
Составим матрицы при заданных значениях параметров:

Обеспечить в системе собственные числа {-1 -1 -1 -1 -1 -1}
Расчет наблюдателя пониженного порядка
Рассчитаем наблюдатель пониженного порядка, используя стандартную процедуру.
![]()
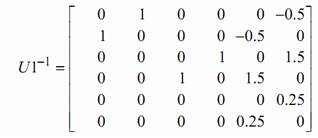
Уравнение наблюдателя:
![]()
![]()
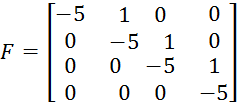
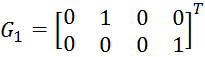
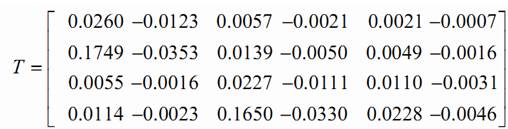
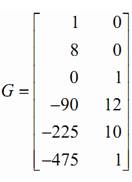
Для расчета матриц T, G2, G, H зададим матрицы F и G1. Матрица F задается из условий быстродействия:
Матрица G1 задается из условия управляемости по каналу y:
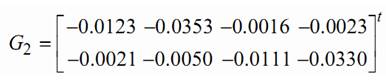
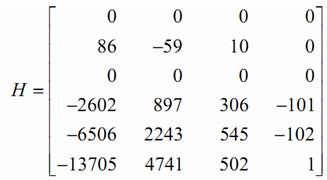
С помощью пакета MATLAB рассчитаны матрицы T, G2, G и H.
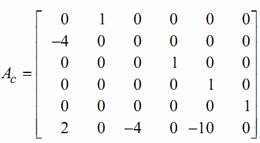
Вычисление матрицы обратной связи
С помощью пакета MATLAB нашли описание объекта в управляемой канонической форме и матрицу обратной связи:
![]()
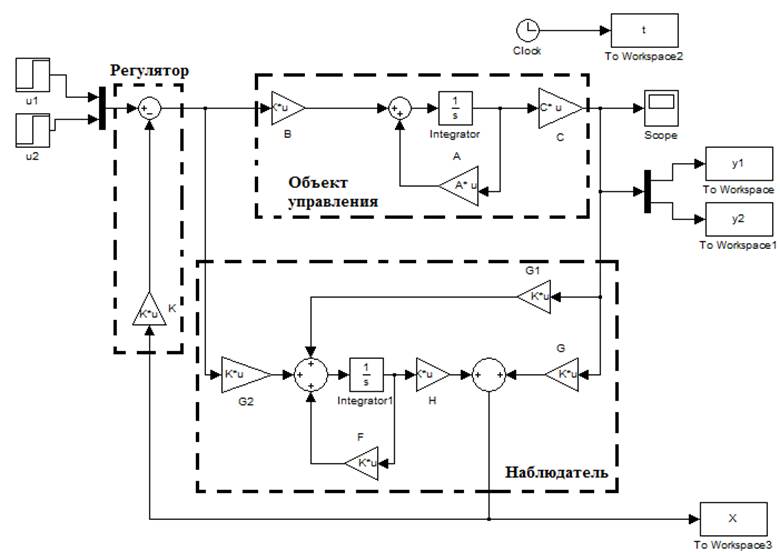
Рис.1 Схема системы управления с регулятором и наблюдателем пониженного порядка.
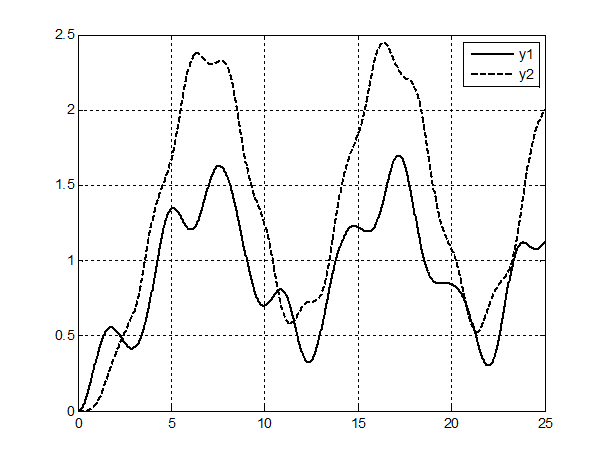
Рис.2 Переходные процессы у1 и y2 в системе без регулятора и наблюдателя
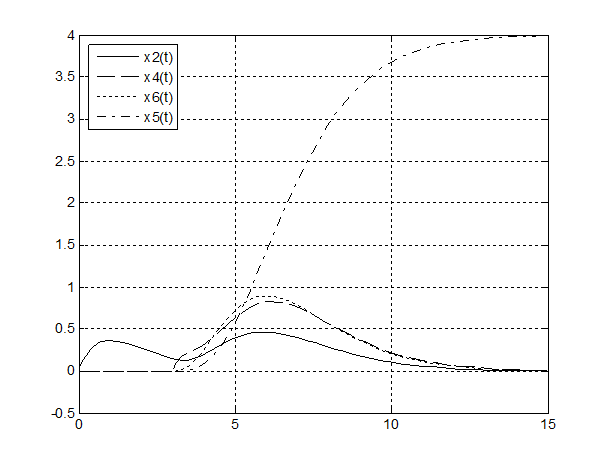
Рис.3 Переменные состояния на выходе наблюдателя (искл. x1 и x3, т.к. y1=x1, y2=x2)
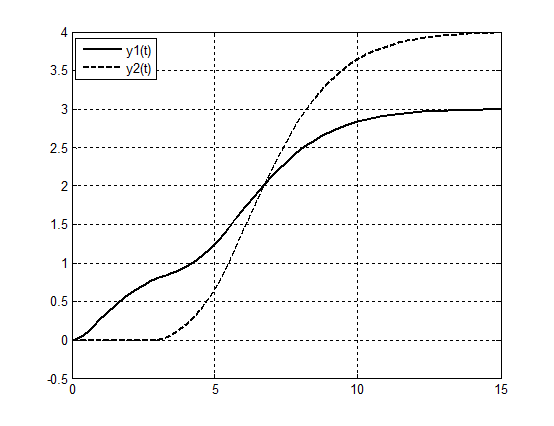
Рис.4 Работа схемы с регулятором и наблюдателем y1 и y2
Выводы
В ходе лабораторной работы была решена задача модального синтеза многоканального регулятора (наблюдателя пониженного порядка и обратной связи с матрицей коэффициентов) в пространстве состояний на примере двухканальной системы, состоящей из трех масс. В данном случае «сложность» регулятора, которую можно оценить как размер матрицы F, меньше размера матрицы объекта A на число «выходов» объекта. Статический режим при таком методе синтеза неудовлетворителен.
Приложение
Листинг MATLAB*
G1=[0 0; 1 0; 0 0 ; 0 1];
F=[-5 1 0 0; 0 -5 1 0; 0 0 -5 1; 0 0 0 -5];
A=[0 1 0 0 0 0; -4 0 2 0 0 0; 0 0 0 1 0 0 ; 2 0 -6 0 4 0; 0 0 0 0 0 1; 0 0 4 0 -4 0];
B=[0 1 0 0 0 0; 0 0 0 1 0 0]';
C=[1 0 0 0 0 0; 0 0 1 0 0 0];
G1C=G1*C;
E6=eye(6);
E4=eye(4);
W1=kron(F,E6);
W2=kron(E4,A');
W=-W1 + W2;
g1c=reshape(G1C',24,1);
t=W\g1c;
T=reshape(t,6,4)';
G2=T*B;
Q=[T;C];
X=Q^-1;
H=X(:,1:4);
C=X(:,5:6);
U=[B,A*B,A^2*B,A^3*B,A^4*B,A^5*B];
B;
b1=B(:,1)';
b2=B(:,2)';
U1=[b1,A*b1,b2,A*b2,A^2*b2, A^3*b2];
R=U1^-1;
R;
q1=R(2,:);
q2=R(6,:);
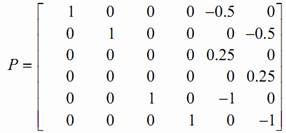
P=[q1' (q1*A)' q2' (q2*A)' (q2*A^2)' (q2*A^3)']';
Ac=P*A*P^-1;
Bc=P*B;
Cc=[1 0 0 0 0 0; 0 0 1 0 0 0]*P^-1; % С первоначальная нужна
Ac=Ac';
Ob=[Ac(:,2) Ac(:,6)]';
Ac=Ac';
J=[-1 -2 0 0 0 0; 2 0 -1 -4 -6 -4];
Kc=Ob-J;
Kc.
* Жирным шрифтом помечены формулы, в написание которых были внесены изменения для обеспечения должного функционирования по сравнению с методическим пособием СБОРНИК НАУЧНЫХ ТРУДОВ НГТУ. – 2010. – № 4(62). – 13–24
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.


