




Министерство образования и науки РФ
Федеральное агентство по образованию
Новосибирский государственный технический университет
Кафедра Автоматики
Лабораторная работа №1
Стабилизация
двухмассовой системы:
модальный метод синтеза с использованием
полиномиального разложения
Факультет: АВТ
Группа: ААМ–10
Студенты: Розенталь П. Преподаватель:
Ливенец Д. Воевода А.А.
Малинников А.
Новосибирск, 2010
Цель работы
Разработать и синтезировать регулятор для двухканальной системы, обеспечить астатический режим.
Выполнение работы
Модель объекта представляет собой систему из двух
грузов, подвешенных последовательно на двух пружинах жесткости ![]() и
и ![]() с
коэффициентами демпфирования
с
коэффициентами демпфирования ![]() и
и ![]() . Предполагается два управляющих сигнала –
силы –
. Предполагается два управляющих сигнала –
силы – ![]() и
и ![]() ,
приложенные к массам
,
приложенные к массам ![]() и
и ![]() .
.
Управляемые величины – координаты грузов ![]() и
и ![]() ,
отсчитываемые от состояния равновесия. Выпишем модель объекта управления:
,
отсчитываемые от состояния равновесия. Выпишем модель объекта управления:
![]() ,
,
![]() .
.
Таблица 1. Исходные данные
|
|
|
k1 |
k2 |
|
|
|
1 |
1 |
6 |
2 |
0 |
0 |
При отсутствии
демпфирования(![]() =0 и
=0 и ![]() =0) модель объекта «вход - выход»
следующая:
=0) модель объекта «вход - выход»
следующая:
 (1)
(1)
Перейдём к описанию в пространстве состояний. Запишем наблюдаемую каноническую форму:
 (2)
(2)
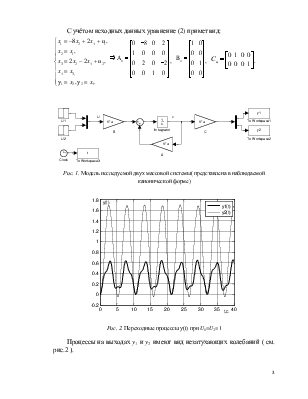
С учётом исходных
данных уравнение (2) примет вид:
 ,
,  ,
,  .
.
Рис. 1. Модель исследуемой двух массовой системы( представлена в наблюдаемой канонической форме)
Рис. 2. Переходные процессы y(t) при U1=U2=1
Процессы на выходах y1 и y2 имеют вид незатухающих колебаний ( см. рис.2 ).
Поставим задачу автономизации каналов с заданными полюсами у замкнутой системы. В качестве исполнительных органов используем интеграторы.
С учетом интеграторов
![]()
система (1) примет вид:
Перейдем к полиномиальному описанию:

Здесь ![]() и
и ![]() .
.
С учётом исходных данных запишем:
Обозначим матрицы при ![]() и
и ![]() через
и
через
и ![]() и
и ![]() :
:
Выберем структуру системы управления вида «задание – сигнал рассогласования – регулятор – объект – обратная связь». Опишем систему уравнениями:
![]() ,
, ![]() ,
, ![]()
Передаточная функция системы имеет вид:
![]() . (3)
. (3)
Выберем правое разложение для объекта и левое разложение для регулятора, т.е.
![]() ,
, ![]() .
(4)
.
(4)
Найдем связь между входом ![]() и
выходом
и
выходом![]() . Подставив (4) в (3), получим:
. Подставив (4) в (3), получим:
![]() .
.
![]() (5)
(5)
Здесь C(s) – желаемая характеристическая матрица системы размером 2 на 2.
![]() ,
, ![]() .
.
Для регулятора выберем полиномиальные матрицы числителя и знаменателя степени два:
![]() ,
, ![]() .
(6)
.
(6)
Тогда степень матрицы C(s)
должна быть равна пяти. Зададим ![]() . Получим:
. Получим:
![]() . (7)
. (7)
После подстановки (6,7) в (5) примет вид:

Приравняем коэффициенты при
одинаковых степенях ![]() :
:
![]() ,
,![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,![]()
Найдём неизвестные:



![]()
Выражение для управления имеет вид:
![]()
Рис. 3. Модель системы с регулятором
Рис. 4. Переходные процессы y(t) при u1(t)=1, u2(t)=1
Из рис. 4 ![]()
Рис. 5. Переходные процессы y(t) при u1(t)=2, u2(t)=5
Из рис. 4 ![]()
Рис. 6. Переходные процессы y(t) при u1(t)=5, u2(t)=2
Из
рис. 4
![]()
Вывод
В ходе данной лабораторной работы был рассчитан регулятор, при помощи которого удалось добиться астатического режима.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.