СБОРНИК НАУЧНЫХ ТРУДОВ НГТУ. – 2012. – № 1(__). – 3–10
автоматическое управление
и идентификация
УДК 681.513
О МОДЕЛИ ПЕРЕВЕРНУТОГО МАЯТНИКА*
А.А. Воевода, Е.В.ШОБА
Приведены нелинейные и линеаризованные модели перевернутого маятника на тележке, соответствующие различным случаям, а именно, при нулевой массе тележки с учетом и без учета момента инерции маятника. Проанализированы две структурные схемы модели, одна из которых включает так называемое “алгебраическое кольцо”.
Ключевые слова: перевернутый маятник, тележка, модель объекта.
В качестве одного из излюбленных примеров анализа и синтеза систем управления берут перевернутый маятник на тележке, например [1, 2]. В одних работах используют дифференциальные уравнения, содержащие каждое вторые производные положения и угла наклона маятника, в других преобразовывают таким образом, что в каждом уравнении остается по одной “старшей производной” и, как следствие, эти уравнения удобны в расчетах и моделировании. Особый интерес представляют эти модели в случае, когда моментом инерции маятника можно пренебречь, а также случай, когда масса тележки существенно меньше массы маятника и ее можно положить равной нулю. Эти вопросы рассмотрены в данной статье.
1.МОДЕЛЬ “ПЕРЕВЕРНУТЫЙ МАЯТНИК НА ТЕЛЕЖКЕ”
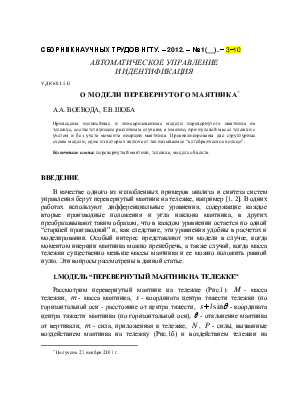
Рассмотрим перевернутый маятник на тележке (Рис.1): ![]() - масса тележки,
- масса тележки, ![]() -
масса маятника,
-
масса маятника, ![]() - координата центра тяжести
тележки (по горизонтальной оси - расстояние от центра тяжести,
- координата центра тяжести
тележки (по горизонтальной оси - расстояние от центра тяжести, ![]() - координата центра тяжести маятника (по
горизонтальной оси),
- координата центра тяжести маятника (по
горизонтальной оси), ![]() - отклонение маятника от вертикали,
- отклонение маятника от вертикали,
![]() - сила, приложенная к тележке,
- сила, приложенная к тележке, ![]() ,
, ![]() - силы,
вызванные воздействием маятника на тележку (Рис.1б) и воздействием тележки на
маятник (Рис.1в),
- силы,
вызванные воздействием маятника на тележку (Рис.1б) и воздействием тележки на
маятник (Рис.1в), ![]() - реакция опоры на тележку,
- реакция опоры на тележку, ![]() - вес маятника,
- вес маятника, ![]() - момент
инерции маятника относительно центра тяжести.
- момент
инерции маятника относительно центра тяжести.
 |
|||
 |
|||
Рис.1а. Маятник на тележке Рис.1б. Тележка- Рис.1в. Маятник-
баланс сил баланс сил
Систему опишем уравнениями – используем баланс сил.
Тележка - баланс сил по горизонтали
![]() (1)
(1)
и баланс сил по вертикали
![]() .
(2)
.
(2)
Маятник- баланс сил по горизонтали
 .
.
Продифференцируем
и еще раз продифференцируем
![]() . (3)
. (3)
Маятник – баланс сил по вертикали
 .
.
Продифференцируем
и еще раз продифференцируем
![]() . (4)
. (4)
Кручение маятника
![]() . (5)
. (5)
Система «тележка - маятник» описывается уравнениями (1
– 5). Уравнение (2) можно исключить из рассмотрения, так как реакция опоры ![]() присутствует только в уравнении (2), из
которого его можно вычислить. Другими словами, система описывается уравнениями
(1), (3)-(5).
присутствует только в уравнении (2), из
которого его можно вычислить. Другими словами, система описывается уравнениями
(1), (3)-(5).
Исключим ![]() из (3), для чего
выразим
из (3), для чего
выразим ![]() из (1) и подставим в (3):
из (1) и подставим в (3):
![]() .
(6)
.
(6)
Исключим
![]() и
и ![]() из (5)
– возьмем их из (3) и (4) и подставим в (5):
из (5)
– возьмем их из (3) и (4) и подставим в (5):
![]()
![]()
![]()
![]() .
.
Сократив первый и предпоследний члены, а также сгруппировав второй и последний, получим
![]() . (7)
. (7)
Теперь
система описывается уравнениями (6) и (7) – в них входят три переменные -
управляющая переменная ![]() , положение тележки
, положение тележки ![]() и наклон маятника
и наклон маятника ![]() .
Эти уравнения не очень удобны для исследования, например, для моделирования,
так как старшие производные второго порядка входят в оба уравнения.
.
Эти уравнения не очень удобны для исследования, например, для моделирования,
так как старшие производные второго порядка входят в оба уравнения.
Избавимся от этого недостатка – преобразуем уравнения
(6) и (7). Вначале поделим уравнение (7) на ![]() и
введем обозначение
и
введем обозначение ![]() :
:
![]() .
.
Значение
![]() подставим в (6), которое перепишем виде (
подставим в (6), которое перепишем виде (![]() )
)
![]() ,
,
откуда
![]() .
.
Перегруппируем
![]()
и
поделим на ![]() :
:
 . (8)
. (8)
Уравнение (6) преобразовано в (8).
Преобразуем уравнение (7), для чего возьмем ![]() из (6)
из (6)
![]()
и подставим в (7):
![]() .
.
Полученное
выражение поделим на ![]() :
:
 .
.
После
деления на ![]() и переноса всех членов, кроме второго,
налево, получим
и переноса всех членов, кроме второго,
налево, получим
 . (9)
. (9)
Система
“перевернутый маятник на тележке” описана уравнениями (8) и (9), где ![]() ,
, ![]() . Эти
уравнения удобны для моделирования, так как в каждое из них входит по одной
старшей производной. При выводе предполагалось, что
. Эти
уравнения удобны для моделирования, так как в каждое из них входит по одной
старшей производной. При выводе предполагалось, что ![]() и
и ![]() .
.
Примечание. Схема данного вывода, содержащая многочисленные опечатки, приведена в [1].
Частный
случай ![]() ,
, ![]() .
.
Уравнение (1) преобразуется в уравнение
![]() ,
(1а)
,
(1а)
Уравнения (3) – (5) не изменяются.
Берем ![]() из (1а) и подставляем в (3)
из (1а) и подставляем в (3)
![]() (6а)
(6а)
Аналогично
общему случаю исключим ![]() и
и ![]() из (5)
– возьмем их из (3) и (4) и подставим в (5), получим
из (5)
– возьмем их из (3) и (4) и подставим в (5), получим
![]() , (7а)
, (7а)
полностью
совпадающее с (7). Итак, при ![]() система описывается
(6а) и (7а). Преобразуем (6а) и (7а) аналогично преобразованиям (6) и (7): (7а)
делим на
система описывается
(6а) и (7а). Преобразуем (6а) и (7а) аналогично преобразованиям (6) и (7): (7а)
делим на ![]() -
- ![]() . Значение
. Значение
![]() подставим в (6а), которое перепишем виде
подставим в (6а), которое перепишем виде ![]() :
:
![]() .
.
Перегруппируем
![]()
и
поделим на ![]() :
:
 . (8а)
. (8а)
Уравнение (6а) преобразовано в (8а).
Преобразуем уравнение (7а), для чего возьмем ![]() из (6а)
из (6а)
![]()
И подставим в (7а):
![]() .
.
Полученное
выражение поделим на ![]() :
:
 .
.
После
деления на ![]() и переноса всех членов, кроме второго,
налево, получим
и переноса всех членов, кроме второго,
налево, получим
 . (9а)
. (9а)
Система
“перевернутый маятник на тележке” описана уравнениями (8а) и (9а), где ![]() . Формально (8а), (9а) можно было получить
из (8), (9) заменой
. Формально (8а), (9а) можно было получить
из (8), (9) заменой ![]() на
на ![]() .
.
Частный
случай ![]() ,
, ![]() . Измениться уравнение (5):
. Измениться уравнение (5):
![]() . (5б)
. (5б)
Выразим ![]() из (1)
и подставим в (3) (получили уравнение (6), но для удобства обозначим его (6б)):
из (1)
и подставим в (3) (получили уравнение (6), но для удобства обозначим его (6б)):
![]() . (6б)
. (6б)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.