4.5.
При ![]() исследовать
влияние начальных условий ФОЧП на y(t), Y(t) и G(t), изменяя
исследовать
влияние начальных условий ФОЧП на y(t), Y(t) и G(t), изменяя
![]() в диапазоне (0,6 - 5)
в диапазоне (0,6 - 5) ![]() .
.
4.6. Исследовать влияние параметра с на характер процессов, уменьшая и увеличивая его значение в 5 раз при исходных значениях начальных условий ДФ и ФОЧП. Сравнить результаты с процессами, полученными в п.4.1. Зарисовать переходные процессы y(t), Y(t) и G(t).
4.7.
При ![]() и
и ![]() исследовать влияние m на y(t), Y(t) и G(t), уменьшая его значение в 5 раз относительно
расчетного.
исследовать влияние m на y(t), Y(t) и G(t), уменьшая его значение в 5 раз относительно
расчетного.
4.8.
При ![]() и
и ![]() оценить влияние m1 на
процессы в системе, уменьшая его значение в 5 раз относительно m2.
оценить влияние m1 на
процессы в системе, уменьшая его значение в 5 раз относительно m2.
4.9.
При ![]() и
и ![]() и рассчитанном значении m2
проанализировать влияние m1 на y(t),
Y(t) и G(t), уменьшая его значение в 5 раз относительно m2.
и рассчитанном значении m2
проанализировать влияние m1 на y(t),
Y(t) и G(t), уменьшая его значение в 5 раз относительно m2.
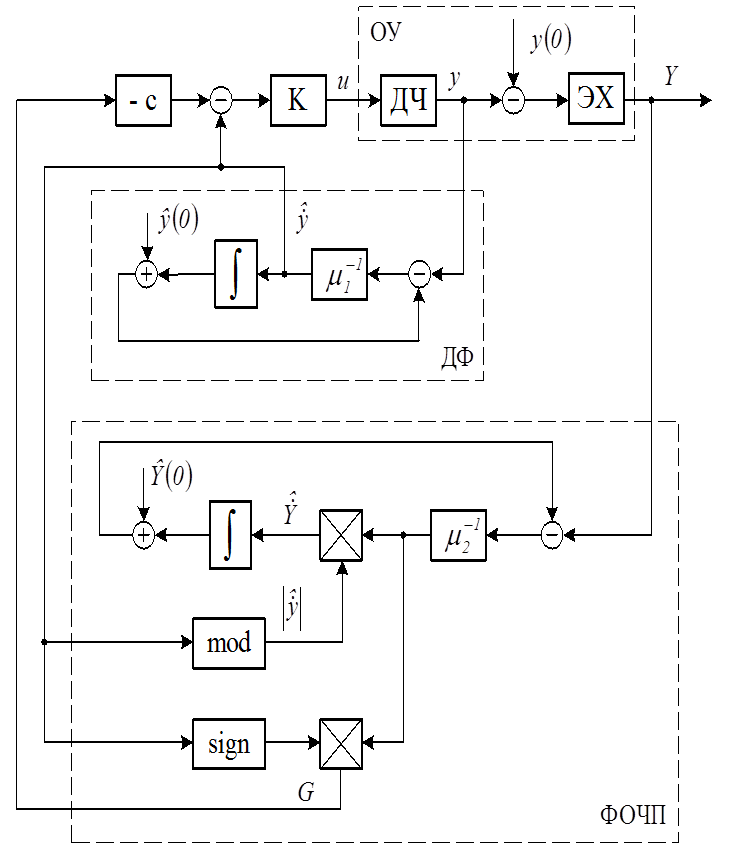
Рис.2.1. Структурная схема системы поиска экстремума
5. Содержание отчета
5.1. Цель работы.
5.2. Результаты расчета параметров регулятора, фильтра оценки частной производной и дифференцирующего фильтра.
5.3. Структурная схема системы.
5.4. Графики всех переходных процессов и фазовых портретов.
5.5. Выводы по работе.
6. Контрольные вопросы
6.1. Как формируется закон управления в системах, основанных на принципе локализации?
6.2. Какова роль градиента в системах подобного типа?
6.3. С какой целью в систему вводится дифференцирующий фильтр?
6.4. Как оценить градиент с помощью ФОЧП?
6.5. Какое влияние оказывают малые инерционности фильтров на свойства замкнутой системы?
Лабораторная работа №3
ИССЛЕДОВАНИЕ свойств ОПТИМАЛЬНОЙ
ПО БЫСТРОДЕЙСТВИЮ СИСТЕМЫ
1. Цель работы
Знакомство с принципом построения оптимальных и субоптимальных систем, анализом влияния основных параметров на ее переходные процессы и фазовый портрет.
2. Основные сведения
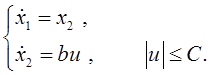
В работе исследуется объект управления, математическая модель которого имеет вид
 (3.1)
(3.1)
Требуется обеспечить в замкнутой системе оптимальные по быстродействию процессы перехода из произвольного начального состояния {x1(0), x2(0)} в заданное конечное, которое совпадает с началом координат, т.е. {x1(T)=0, x2(T)=0}.
С этой целью формируется оптимальный закон управления
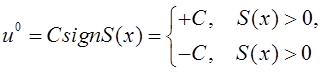 (3.2)
(3.2)
где S(x) – линия переключения управляющего воздействия, которая описывается уравнением
![]() (3.3)
(3.3)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
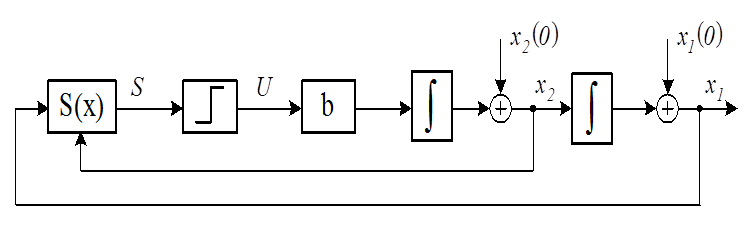
Рис.3.1. Структурная схема оптимальной по быстродействию системы
В реальных системах точно реализовать полученную линию переключения не удается, поэтому используют ее различные аппроксимации, простейшей из которых является аппроксимация прямыми линиями (рис.3.2).
 x2
x2
D
Sp(X) = 0
x1
-D
S(X) = 0
Рис.3.2. Аппроксимация линии переключения
Реальный алгоритм управления по форме совпадает с (3.2), но вместо S(x) используется ее аппроксимация Sp(x).
В этом случае получают не оптимальные, а близкие к ним процессы, которые называются субоптимальными.
3.Методические указания
3.1. При моделировании процессов с помощью программы “Компас” для получения модуля сигнала используется звено “ВЫПР”.
3.2. В качестве метода интегрирования рекомендуется выбирать метод Рунге – Кутта 4-го порядка, а предлагаемый шаг интегрирования уменьшить в 10 раз.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.