Министерство образования и науки Российской Федерации
Федеральное агентство по образованию
Новосибирский Государственный Технический Университет
Лабораторная работа № 1
Типовые звенья САУ
Вариант 4
|
Группа: Студенты: Факультет: |
АА-86 Баранова А.В. Земцов Н.С. АВТ |
Проверил: |
Новосибирск 2010
Исследовать динамические характеристики, основные свойства типовых звеньев систем автоматического управления (САУ), а также познакомиться с основными правилами структурного метода.
1.
Интегрирующее звено дифференциальное
уравнение: ![]()
![]() передаточная функция: W(p))=k/p:
передаточная функция: W(p))=k/p:
2.
Апериодическое звено дифференциальное
уравнение: T![]() + y = ku передаточная функция:W(p)= k/(Tp+1):
+ y = ku передаточная функция:W(p)= k/(Tp+1):
3.
Колебательное звено дифференциальное
уравнение: T2 ![]() + 2 dT
+ 2 dT![]() + y = ku передаточная
функция: W(p)= k /(T2p2+2dTp+1):
+ y = ku передаточная
функция: W(p)= k /(T2p2+2dTp+1):
4.
Реальное дифференцирующее звена
дифференциальное уравнение: m
![]() + y
= ku, передаточная функция: W(p)=
kp /(mp+1).
+ y
= ku, передаточная функция: W(p)=
kp /(mp+1).
5. Схема колебательного звена
|
|
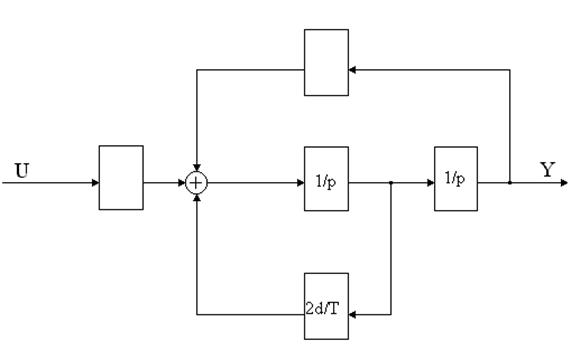
Значение параметров: K=1.50; T=0.80; d=0.30; μ=0.15
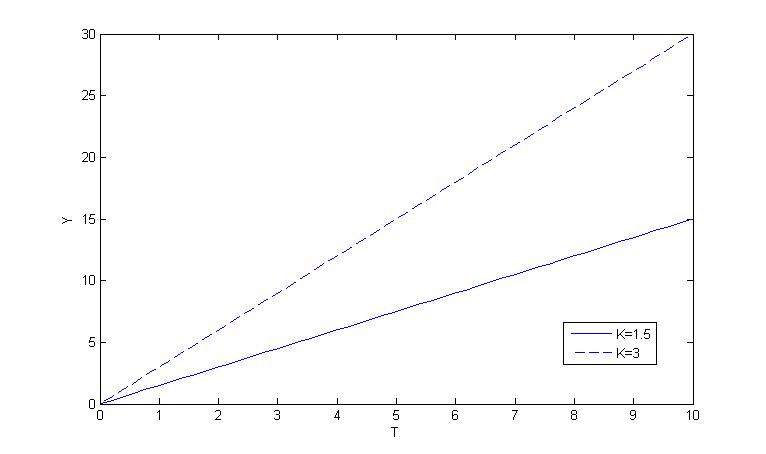
Рис.2 Влияние параметра k на ПФ интегрирующего звена
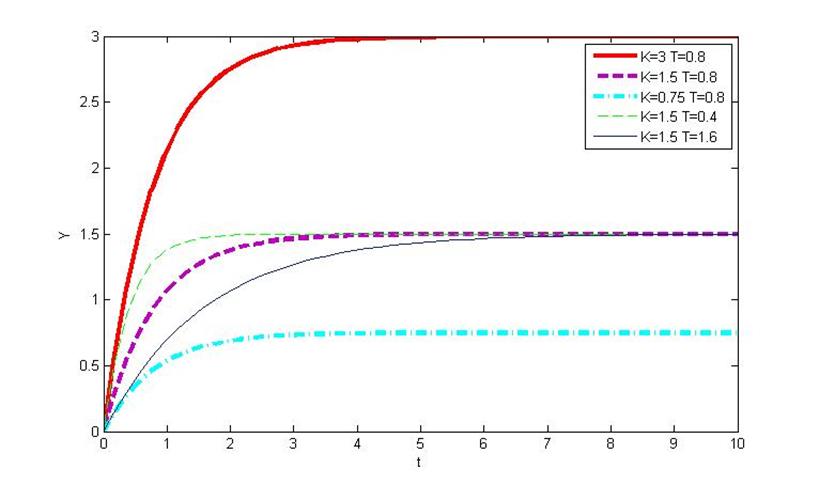
Рис.3 Влияние параметра k и Т на ПФ апериодического звена
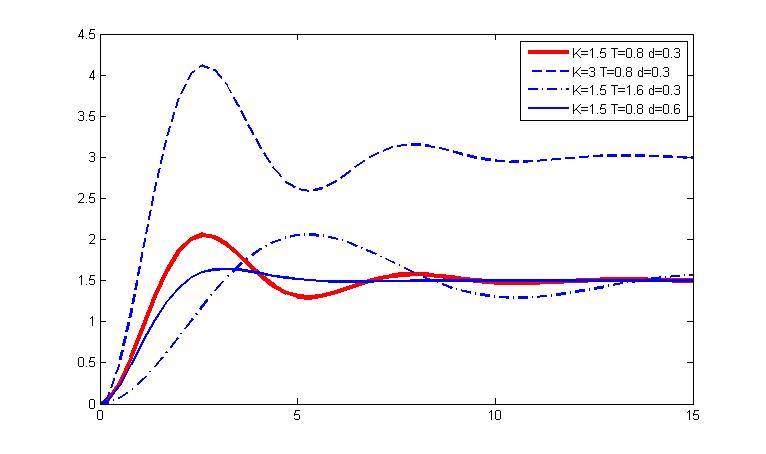
Рис.4 Влияние параметра k и Т и d на ПФ колебательного звена
Вывод:
1. При увеличении параметра k (коэффициент передачи) увеличивается выходной сигнал интегрирующего звена.
2. При увеличении параметра T (постоянная времени) и параметра d (коэффициент демпфирования) выходной сигнал колебательного звена уменьшается, а при увеличении параметра k выходной сигнал увеличивается.
3. Параметр d (коэффициент демпфирования) в нашем случае равен d=0.30 и находится в пределах 0<d<1, следует звено колебательное.
Цель работы: Познакомиться и исследовать частотные характеристики основных звеньев САУ.
Значение параметров: K=1.50; T=0.80; d=0.30; μ=0.15
Таблица изменения амплитуд и сдвига фаз по частотам.
W |
T |
Интегрирующее |
Апериодическое |
Колебательное |
РДЗ |
ИДЗ |
|||||
|
0,1 |
62,8 |
8 |
-0,31 |
4 |
-0,2 |
1,2 |
-0,16 |
0,6 |
1,2 |
0,8 |
2,3 |
|
2 |
3,15 |
0,9 |
-1.2 |
0,51 |
-0,5 |
0,8 |
-0,31 |
0,57 |
0,7 |
1,3 |
1,3 |
|
4,5 |
1,4 |
0,35 |
-1,23 |
0,25 |
-0,98 |
0,45 |
-0,42 |
1,7 |
0,29 |
3,3 |
0,4 |
|
6 |
1,05 |
0,27 |
-1,24 |
0,21 |
-1,1 |
0,3 |
-0,57 |
2,8 |
0,21 |
4,9 |
0,31 |
|
6,5 |
0,97 |
0,24 |
-1,25 |
0,18 |
-1,21 |
0,21 |
-0,62 |
2,85 |
0,18 |
5,3 |
0,18 |
|
8 |
0,78 |
0,13 |
-1,28 |
0,16 |
-1,25 |
0,15 |
-0,71 |
2,9 |
0,12 |
7 |
0,13 |
|
10 |
0,63 |
0,12 |
-1,3 |
0,12 |
-1,28 |
0,11 |
-0,8 |
3,1 |
0,11 |
8,5 |
0,10 |
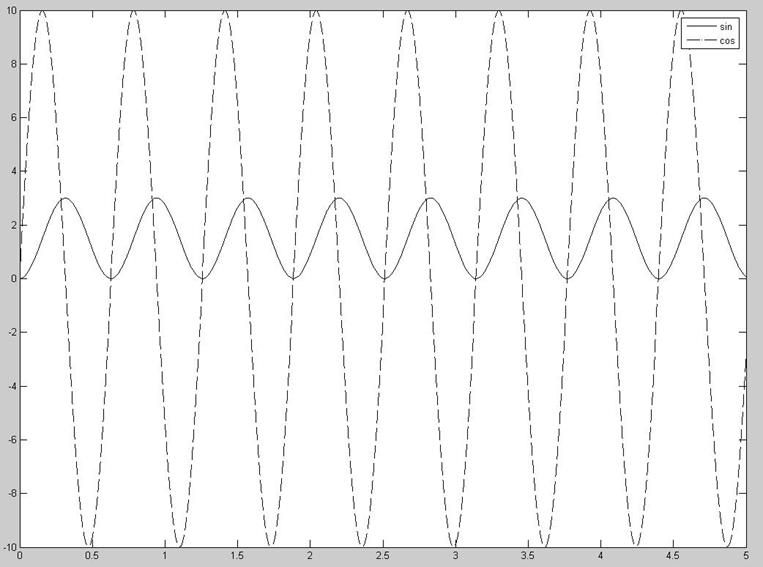
Рис.5 ФЧХ интегратора.
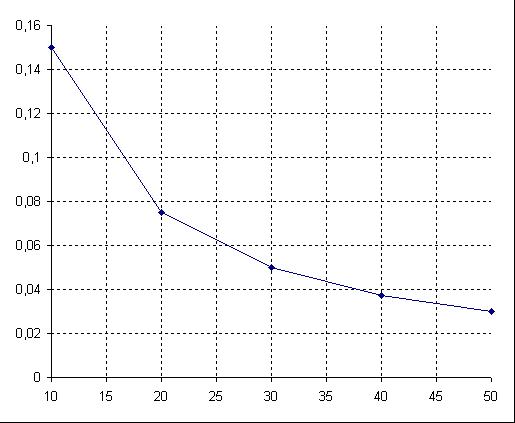
Рис.6 АЧХ интегратора.
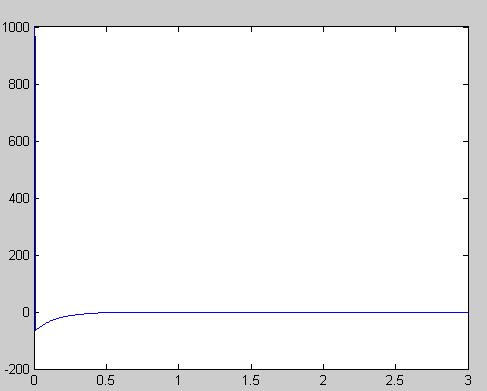
Рис. 7 Импульсная переходная функция дифференцирующего звена.
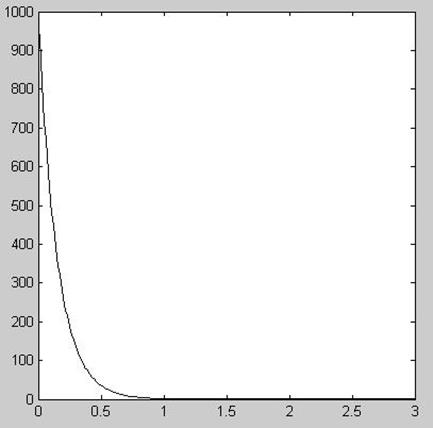
Рис. 8 Переходная характеристика дифференцирующего звена.
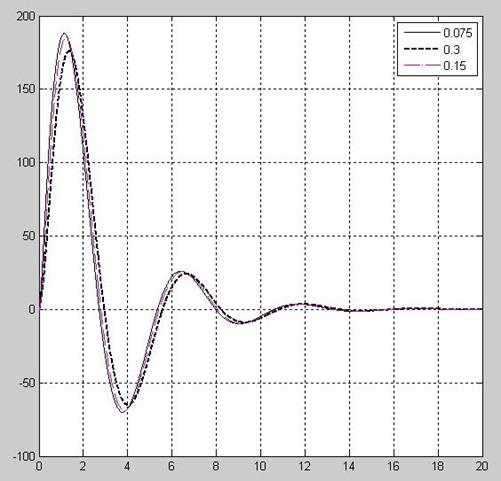
Рис. 9 Оценка влияния m на точность воспроизведения производной дифференцирующим звеном.
Выводы:
Исследовали динамические характеристики, а также основные свойства типовых звеньев систем автоматического управления (САУ). С ростом частоты выходной сигнал АЧХ апериодического, интегрирующего и колебательного звена уменьшается, а в РДЗ увеличивается.
Интегрирующее, апериодическое и колебательное звенья имеют отрицательный сдвиг фаз, а РДЗ и ИДЗ - положительный.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.