
18 Силовой расчёт механизмов с учетом трения в КП. Решение нелинейных..
Система уравнений кинетостатики для ползуна:
–R23cosα + (P + Ф3) + fR03signR03 = 0,
R23sinα + R03 – G3 = 0,
–R03a + fR03h = 0.
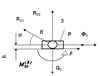
Здесь а – расстояние от оси шарнира В до линии действия
силы реакции ![]() ,
,
выразим R23:
![]()
Подставляя R23 в первое уравнение :
![]()
|
«малое» трение: f < ctgα |
«большое» трение: f > ctgα |
|
|
G3ctgα – (P + Ф3) < 0 |
тяговый режим |
решения не существует режим самоторможения |
|
G3ctgα – (P + Ф3) > 0 |
инверсный тяговый режим. |
два решения
режим оттормаживания |
Вариант 1.2. «Большое» трение; рабочая нагрузка P и
сила инерции Ф3 направлены против скорости ползуна. Уравнение (5.26)
не имеет решения. Действительно, положив R03 > 0 (signR03 = + 1), получим ![]() ,
,
т.к. числитель дроби отрицательный, а знаменатель – положительный. При R03<0 (signR03 = – 1)
имеем ![]() , поскольку числитель и знаменатель дроби
отрицательные. Получающееся противоречие показывает, что решения не существует.
Этот случай соответствует режиму самоторможения, при котором в рассматриваемом
положении механизма и при заданном направлении силы движение вообще становится
невозможным.
, поскольку числитель и знаменатель дроби
отрицательные. Получающееся противоречие показывает, что решения не существует.
Этот случай соответствует режиму самоторможения, при котором в рассматриваемом
положении механизма и при заданном направлении силы движение вообще становится
невозможным.
Вариант 2.2. «Большое» трение; силы Pи Ф3 направлены против оси х («помогают» движению ползуна). Тогда уравнение (5.26) имеет два решения. Действительно, полагая, что R03 > 0 (signR03 = + 1), имеем:
![]() ,
,
поскольку числитель и знаменатель дроби положительные. Положив R03 < 0 (signR03 = – 1),
получаем второе решение ![]() ,
поскольку числитель положительный, а знаменатель отрицательный. В этом случае
мы имеем дело с режимом оттормаживания: при «большом» трении движение
возможно в том случае, когда вектор Р + Ф3 направлен
так же, как и скорость ползуна. Существование двух режимов оттормаживания
является одним из парадоксов Кулонова трения, подробно исследованных в книге
Пенлеве[1]. Установить, какое из решений будет фактически
осуществляться, строго говоря, в рамках модели механизма с жесткими звеньями
невозможно. Можно только показать, что некоторые «физические» соображения
свидетельствуют в пользу первого решения. Нетрудно понять, что при увеличении
коэффициента трения f следует ожидать увеличения модуля силы трения |F|
, т.е. должно быть d|F|/df>0. Исследуя первое решение, получаем
,
поскольку числитель положительный, а знаменатель отрицательный. В этом случае
мы имеем дело с режимом оттормаживания: при «большом» трении движение
возможно в том случае, когда вектор Р + Ф3 направлен
так же, как и скорость ползуна. Существование двух режимов оттормаживания
является одним из парадоксов Кулонова трения, подробно исследованных в книге
Пенлеве[1]. Установить, какое из решений будет фактически
осуществляться, строго говоря, в рамках модели механизма с жесткими звеньями
невозможно. Можно только показать, что некоторые «физические» соображения
свидетельствуют в пользу первого решения. Нетрудно понять, что при увеличении
коэффициента трения f следует ожидать увеличения модуля силы трения |F|
, т.е. должно быть d|F|/df>0. Исследуя первое решение, получаем
![]() ,
,
поскольку G3ctgα – (P + Ф3) > 0. Следовательно,
![]() .
.
Для второго решения находим
![]() ,
,
поскольку ctgα – f < 0. Следовательно,
![]() .
.
Поэтому второе решение является с физической точки зрения «недостоверным».
Сведем все найденные решения в табл. 5.4. Для удобства сравнения результатов, полученных двумя методами, разделим числитель и знаменатель дроби выражения (5.26) на ctgα.
|
«Малое» трение: f < ctgα |
«Большое» трение: f > ctgα |
|
|
G3ctgα – (P + Ф3) < 0 |
Тяговый режим |
Нет решения. Режим самоторможения |
|
Метод последовательных приближений |
|
– |
|
G3ctgα – (P + Ф3) > 0 |
Инверсный тяговый режим |
Режим оттормаживания |
|
Метод последовательных приближений |
ּ[ + |
– |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.