
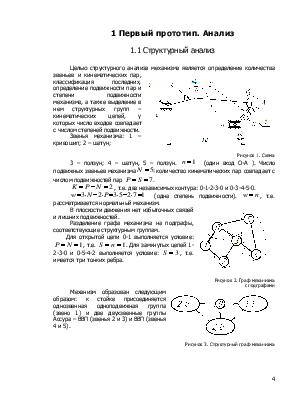









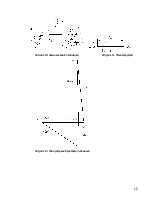










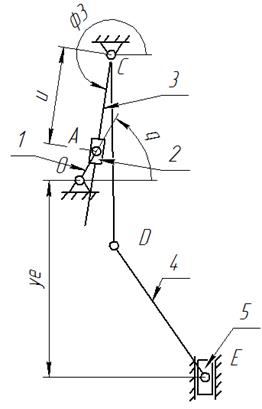
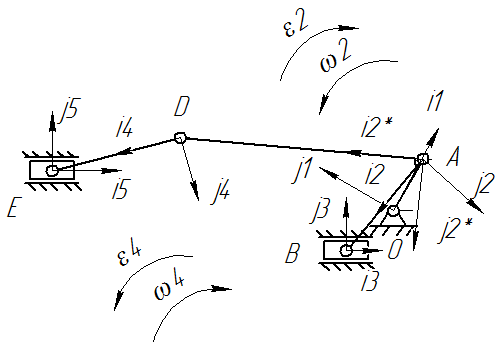
Звенья механизма: 1 – кривошип; 2 – камень; 3 – коромысло; 5 – ползун, 4 – шатун.
![]() (один вход О-А ).
(один вход О-А ).
Число подвижных звеньев механизма
![]() количество кинематических пар совпадает с
числом подвижностей пар
количество кинематических пар совпадает с
числом подвижностей пар ![]()
![]() , т.е. два независимых контура:
0-1-2-3-0 и 0-3-4-5-0.
, т.е. два независимых контура:
0-1-2-3-0 и 0-3-4-5-0.
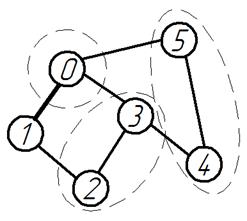
Рисунок 4. Схема Рисунок 5. Граф механизма с подграфами
![]() (одна степень подвижности).
(одна степень подвижности).
![]() , т.е. рассматривается нормальный
механизм.
, т.е. рассматривается нормальный
механизм.
В плоскости движения нет избыточных связей и лишних подвижностей.
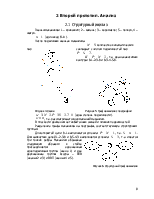
Разделение графа механизма на подграфы, соответствующие структурным группам.
 Для открытой цепи 0-1 выполняется условие:
Для открытой цепи 0-1 выполняется условие: ![]() , т.е.
, т.е. ![]() . Для
замкнутых цепей 1-2-3-0 и 0-5-4-3 выполняется условие:
. Для
замкнутых цепей 1-2-3-0 и 0-5-4-3 выполняется условие: ![]() ,
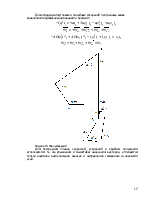
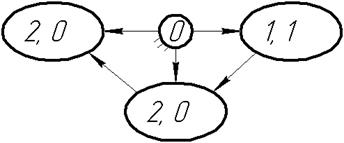
т.е. имеется три тонких ребра. Механизм образован следующим образом: к стойке
присоединяется однозвенная одноподвижная группа (звено 1) и две двухзвенные
группы Ассура – ВПВ (звенья 2 и 3) и ВВП (звенья 4 и 5).
,
т.е. имеется три тонких ребра. Механизм образован следующим образом: к стойке
присоединяется однозвенная одноподвижная группа (звено 1) и две двухзвенные
группы Ассура – ВПВ (звенья 2 и 3) и ВВП (звенья 4 и 5).
Рисунок 6. Структурный граф механизма
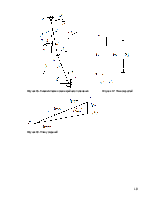
Размыкая кинематическую цепь в шарнирах А и C, приведем замкнутую цепь к открытой цепи (ветви: ОА, СА, CDE, BE).
На структурной схеме и графе механизма обозначим входную
координату ![]() и четыре групповые координаты:
и четыре групповые координаты: ![]() Их число совпадает с числом
разомкнутых связей:
Их число совпадает с числом
разомкнутых связей: ![]()
Уравнения геометрического анализа.
Кривошип:
Группа ВПВ (2-3):
Группа ВВП (4-5):
Решение групповых уравнений
Уравнения группы ВПВ, возведенные в квадрат и сложенные, дают выражение для относительной координаты. Замечено, что для такой структурной группы существует только один способ сборки.
![]()
![]()
Определение угла ![]() из уравнений группы ВПВ (2-3)
из уравнений группы ВПВ (2-3)
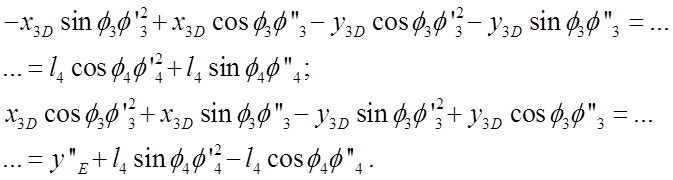
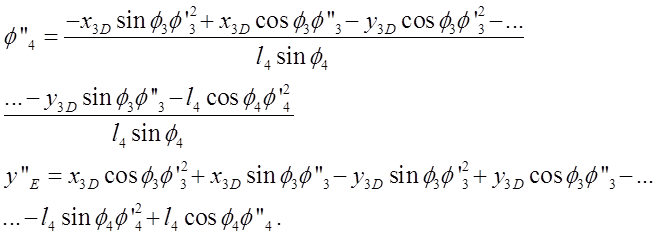
Из уравнений группы ВВП (4-5) получено:
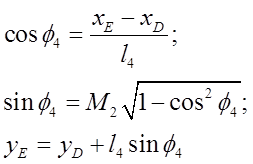
Здесь коэффициент сборки М2=±1 перед радикалом указывает на два решения тригонометрических уравнений. Этим решениям соответствуют два варианта сборки звеньев 5 и 4 группы ВВП.
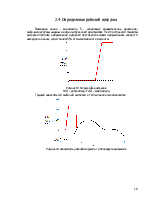
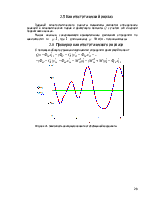
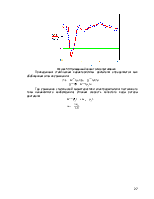
Исследование функций положения
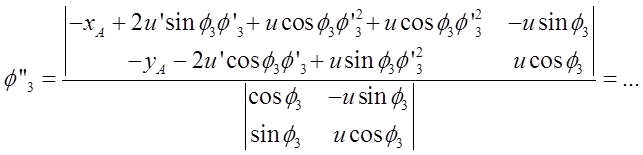
Определение аналогов скоростей и ускорений выполнено путем двойного дифференцирования по обобщенной координате уравнений геометрического анализа. Для группы ВПВ (2-3), получено:
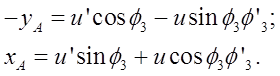

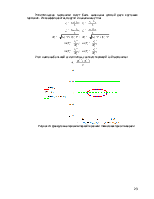
Отсюда по правилу Крамера
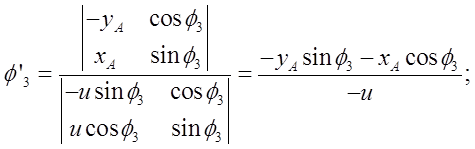
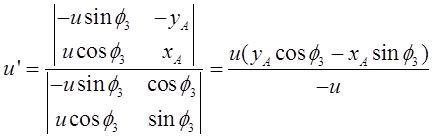
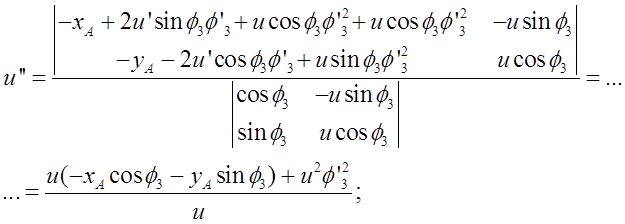
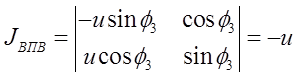
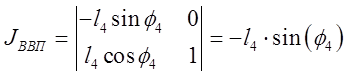
Определитель полученных систем уравнений совпадает с якобианом исходной системы уравнений группы ВВП и выражается формулой:
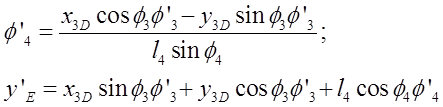
Из уравнений группы ВВП (4-5) дифференцированием получено:



Якобиан системы уравнений группы ВВП:
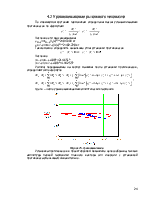
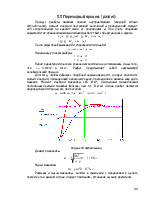
Группа ВПВ (2-3) попадает в особое положение при:
![]()
, т.е. камень 2 совпадает с точкой стойки С.
Особое положение группы ВВП (4-5) имеет место при выполнении
условия: ![]() ,
т. е. когда
,
т. е. когда ![]()
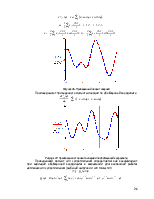
По значениям хода выходного звена H=60 град и коэффициента производительности Kv=1.4 были подобраны следующие постоянные геометрические параметры кинематической схемы механизма:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
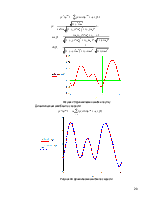
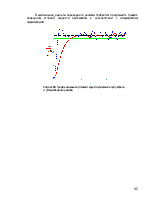
Графическое изображение функций положения и их производных – см. приложение.
Таблица 1. Сравнение двух прототипов
|
Таблица сравнения двух механизмов |
|||||
|
№ |
K1 |
K2 |
Габариты, м |
Фактический ход, град |
Кv |
|
1 (Схема 9) |
4.222 |
1.809 |
1.16 |
60.026 |
1.401 |
|
2.463 |
0.56 |
||||
|
2 (Схема 8) |
5.838 |
- |
0.57 |
59.538 |
|
|
6.649 |
1.08 |
1.401 |
|||
Здесь К1 – критерий качества передачи движения, характеризующий соотношение между внешними усилиями на входе и выходе. К2 – критерий качества передачи движения, характеризующий относительный уровень внутренних сил (реакций). Kv – коэффициент изменения средней скорости выходного звена (коэффициент производительности). Ход – угол между крайними положениями выходного звена – шатуна.
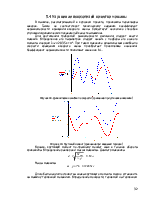
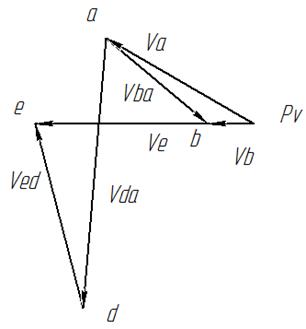
После проведения геометрического и кинематического анализа двух прототипов, сравнения критериев качества механизма, приведенных в таблице 1, сделан вывод, что первый прототип более выгоден, так как коэффициенты К1 и К2 меньше, а габаритные размеры отличаются незначительно. Меньшие усилия ведут к более легким и дешевым шарнирам, соединениям. Графический метод кинематического анализа (построение планов скоростей и ускорений) производится для обоих прототипов.
Целью кинематического анализа является определение скоростей и ускорений отдельных точек и звеньев рычажного механизма по известному закону входного звена.
Определение скоростей и ускорения звеньев механизма и его шарнирных точек при помощи планов скоростей и ускорений.
 Для этого выполнена кинематическая схема механизма в
расчетном
Для этого выполнена кинематическая схема механизма в
расчетном
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.