 Рис.-фрагмент
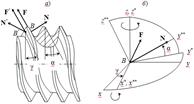
червяка. Рабочие поверхности витка червяка и зуба червячного колеса
контактируют в точке В(В′),т.е. в зацеплении образуется пятиподвижная К-ая
пара. В точке контакта возникают нормальная сила N (N′) и сила
трения F (F′), касательная к пов-ти витка червяка и направленная
противоположно скорости скольжения. Надо определить проекции этих сил на
направления,|| осям червяка и червячного колеса. Введем систему координат Вхуz, где ось Вх ||
оси червячного колеса, ось Ву|| оси червяка, а ось Bz || линии
межосевого расстояния (рис б). Если повернуть систему координат Вхуz вокруг оси Bz на угол γ – до
совмещения оси Вх с линией действия силы трения F, получим систему
координат Вх*у*z*- ось Вх* будет
направлена по касательной к пов-ти витка червяка в точке контакта В. Угол γ –
угол подъема винтовой линии червяка (при γ = 0 винтовая линия обращается в
кольцевую). Потом повернем новую систему коорд Вх*у*z* вокруг оси Вх*
на угол α до совмещения оси Ву* с линией действия норм.силы N –получим
новую систему корд.Вх**у** z**, в кот ось Ву** направлена ┴-но
поверхности червяка в (∙) контакта В. Угол α – угол профиля исходного контура
(при α=0 виток червяка становится прямобочным). Тогда F=-fNsign Nsignq̇ - проекции силы
на оси С.коорд. Вхуz(рис 5.7)
Рис.-фрагмент
червяка. Рабочие поверхности витка червяка и зуба червячного колеса
контактируют в точке В(В′),т.е. в зацеплении образуется пятиподвижная К-ая
пара. В точке контакта возникают нормальная сила N (N′) и сила
трения F (F′), касательная к пов-ти витка червяка и направленная
противоположно скорости скольжения. Надо определить проекции этих сил на
направления,|| осям червяка и червячного колеса. Введем систему координат Вхуz, где ось Вх ||
оси червячного колеса, ось Ву|| оси червяка, а ось Bz || линии
межосевого расстояния (рис б). Если повернуть систему координат Вхуz вокруг оси Bz на угол γ – до
совмещения оси Вх с линией действия силы трения F, получим систему
координат Вх*у*z*- ось Вх* будет
направлена по касательной к пов-ти витка червяка в точке контакта В. Угол γ –
угол подъема винтовой линии червяка (при γ = 0 винтовая линия обращается в
кольцевую). Потом повернем новую систему коорд Вх*у*z* вокруг оси Вх*
на угол α до совмещения оси Ву* с линией действия норм.силы N –получим
новую систему корд.Вх**у** z**, в кот ось Ву** направлена ┴-но
поверхности червяка в (∙) контакта В. Угол α – угол профиля исходного контура
(при α=0 виток червяка становится прямобочным). Тогда F=-fNsign Nsignq̇ - проекции силы
на оси С.коорд. Вхуz(рис 5.7)
S = Nּcosαּcosγ – Fּsinγ =N(cosαּcosγ – fּ signNּsinγּsignq̇),
P = Nּcosαּsinγ + Fּcosγ =N(cosαּsinγ + fּsignNּcosγּsignq̇), T = Nּsinα.
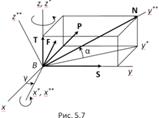 S – осевая сила на
червяке (окружная сила на червячном колесе); P – окружная сила на
червяке (осевая на червячном колесе); Т– радиальная сила.
S – осевая сила на
червяке (окружная сила на червячном колесе); P – окружная сила на
червяке (осевая на червячном колесе); Т– радиальная сила.
При изменении направления момента, приложенного к
колесу, сила N также изменяет
направление на противоположное, а направл силы Fменяется
только при изменении знака q̇.
Пусть tgψч=f/cosα,
где ψч –приведенный
угол трения червяка, тогда: ![]()
11.Уравнения Лагранжа 2-го рода для механизма с несколькими степенями подвижности.
Уравнения Лагранжа второго рода
для механизма с w степенями подвижности, с жесткими звеньями и
идеальными кинематическими парами могут быть получены из общего уравнения
динамики. Работа сил инерции на возможном перемещении, входящая в это
уравнение, может быть выражена через кинетическую энергию системы. Для
механизма с w степенями
подвижности справедливо:![]() =
= ![]() где Т(q1, …, q, q̇1,…,q̇w) – кинетическая
энергия механизма, представленная как функция от обобщенных координат и их
производных. В результате при независимых обобщенных координатах получаем:
где Т(q1, …, q, q̇1,…,q̇w) – кинетическая
энергия механизма, представленная как функция от обобщенных координат и их
производных. В результате при независимых обобщенных координатах получаем: ![]() s = 1, … , w, где
s = 1, … , w, где![]() Qs– обобщенные
движущие силы;
Qs– обобщенные
движущие силы;![]() – обобщенные силы
сопротивления, соответствующие всем активным силам, кроме движущих.
– обобщенные силы
сопротивления, соответствующие всем активным силам, кроме движущих.
Кинетическая энергия каждого звена
в общем случае определяется как кинетическая энергия твердого тела,
совершающего сложное пространственное движение(по теореме Кенинга):![]() , (6.20)где i – номер звена, mi – его масса, vci – скорость
центра масс, Jсi – тензор инерции i –го звена в его центре
масс Ci, Ωi(i) –абсолютная
угловая скорост i –го звена. Учитывая, что
, (6.20)где i – номер звена, mi – его масса, vci – скорость
центра масс, Jсi – тензор инерции i –го звена в его центре
масс Ci, Ωi(i) –абсолютная
угловая скорост i –го звена. Учитывая, что  ,
где JxCi, JyCi, JzCi– осевые моменты
инерции i-го звена, Jxyci, Jxzci, Jyzci –центробежные
моменты инерции, а матрица
,
где JxCi, JyCi, JzCi– осевые моменты
инерции i-го звена, Jxyci, Jxzci, Jyzci –центробежные
моменты инерции, а матрица ,где Ωix(i), Ωiy(i),
Ωiz(i) – проекции вектора угловой скорости i-го звена Ωi на оси i-й системы
координат, выражение (6.20) запишем в виде:
,где Ωix(i), Ωiy(i),
Ωiz(i) – проекции вектора угловой скорости i-го звена Ωi на оси i-й системы
координат, выражение (6.20) запишем в виде:![]()
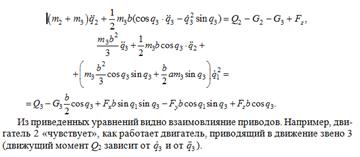
Пример к 11 вопр: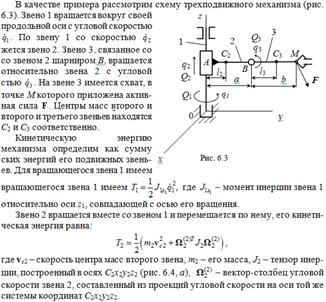


Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.