3.Определение главного вектора и главного момента сил инерции (общий случай; поступательное движение).Если известны ускорение полюса
где JX, JY, JZ – осевые, а JXY, JYZ, JXZ – центробежные моменты инерции. Найдем выражения для проекций на оси главного вектора и главного момента сил инерции в некоторых частных случаях. a). Поступательное движение
звена. Учитывая, что ω=0, ε=0,
найдем
Здесь хс, yc, zc – координаты центра масс. Тогда:
|
5. Решение уравнений кинетостатики. Особенности расчёта плоского механизма. Пример с одноподвижным механизмом.Для механизмов с идеальными связями уравнения кинетостатики представляют собой систему линейных алгебраических уравнений, обладающую единственным решением, если избыточные связи в системе отсутствуют, а рассматриваемое положение механизма не является особым. Для сложных механизмов, содержащих большое число подвижных звеньев, система уравнений кинетостатики имеет высокий порядок (для N–1 подвижных звеньев – 6ּ(N–1) уравнений). Ее решение существенно облегчается тем, что она может быть разделена на несколько независимых систем, каждая из которых содержит обобщенную движущую силу и реакции кинематических пар, действующие на звенья одной структурной группы. Действительно, для каждой структурной группы, не содержащей избыточных связей, справедлива структурная формула
где wG – число степеней подвижности группы, NG – число подвижных звеньев группы, pSG – число s-подвижных кинематических пар в группе. С другой стороны, как было показано выше, сумма
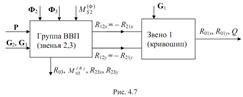
представляет собой число неизвестных движущих сил и реакций в идеальных связях, подлежащих определению. Сравнивая выражения (4.23) и (4.24), замечаем, что nu=6NG, т.е. число неизвестных сил равно числу уравнений кинетостатики. Таким образом, уравнения кинетостатики могут решаться последовательно для каждой структурной группы. Силовой расчет следует производить в направлении, обратном геометрическому и кинематическому расчетам, т.е. начинать его с групп последнего слоя. Тогда реакции во внешних кинематических парах групп m–го слоя оказываются известными и могут рассматриваться как заданные силы при расчете групп (m–1)-го слоя. |
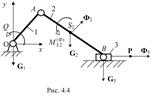
6. Особенности расчёта плоского механизма. Пример с многоподвижным механизмом.Определяем компоненты реакций, лежащих в плоскости
движения х0y (Rx, Ry, Из-за наличия избыточных связей определение всех реакций
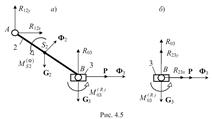
второй группы (Rz, а) Активные силы: заданные силы инерции, лежащие в плоскости движения Подлежащие определению: движущий момент Q, реакции в кинематических парах. Группы Асура ВВП:
6 неизвестных: R12x, R12y, R23x, R23y, R03, Сумма моментов всех сил, действующих на звенья 2 и 3, относительно оси Аz: (Р + Ф3)(yA – yB) – (R03 – G3)(xA – xB) + Ф2x(yA – yS2) – – (Ф2y – G2)(xA – xS2) + R23x + P + Ф3 = 0, R03 + R23y – G3 = 0. Уравнения для звеньев 2 и 3: R12x + Ф2x + P + Ф3 = 0; R12y + Ф2y – G2 + R03 – G3 = 0. Первая структурная группа:
Неизвестные: компоненты реакций R21x + R01x = 0, R21y + R01y – G1 = 0, R21x(y0 – yA) – R21y(x0 – xA) + Q = 0. Последовательность силового расчета:
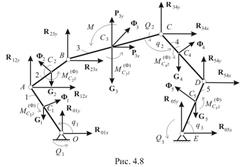
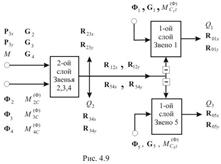
б) Механизм с тремя степенями подвижности (рис.4.8). Данный механизм состоит из трех одноподвижных групп: двух однозвенных (звенья 1 и 5) и одной трехзвенной (звенья 2, 3, 4). Силовой расчет последней структурной группы АВСD. 9 уравнений кинетостатики, из которых определяем обобщенную движущую силу Q2 и 8 реакций (R12X, R12Y, R23X, R23Y, R34X, R34Y, R54X, R54Y). Затем приступаем к расчету однозвенных групп первого слоя ОА и ЕD. При этом силы R21X = – R12X, R21Y = – R12Y, R45X = – R54X, R45Y = – R54Y рассматриваются уже как известные, найденные на предыдущем этапе. Из уравнений кинетостатики для звена ОА определяем R01X, R01Y и обобщенную движущую силу Q1; из уравнений, составленных для звена ЕD, определяем R05X, R05Y и обобщенную движущую силу Q3.
|
|
26. Потери энергии на трение в цикловых механизмах. КПД механизма.Движение циклового механизма сопровождается
преобразованием энергии. Баланс работ за цикл может быть записан для
механизма в следующей форме: АДС – работа движущих сил, АПС – работа сил полезного сопротивления, АТР – работа сил трения. Рассмотрим в качестве примера кривошипно-ползунный механизм, показанный. Мощность сил трения
F –
сила трения в поступательной паре,
Учитывая, что
Получаем
Для приближенного вычисления этого интеграла определяются |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
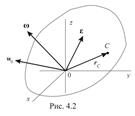 Здесь m – масса звена, I0 – тензор инерции в точке О. Если
ввести систему координат 0хyz,
связанную со звеном, то тензор I0 можно
задавать матрицей моментов инерции
Здесь m – масса звена, I0 – тензор инерции в точке О. Если
ввести систему координат 0хyz,
связанную со звеном, то тензор I0 можно
задавать матрицей моментов инерции
 (4.19)
(4.19)