нулю работа сил реакций, действующих на каждое отдельное звено.
Если механизм имеет w степеней свободы и q1,…,qw – его обобщенные координаты, то
![]()
![]() (4.29)
(4.29)
Подставляя (4.29) в (4.28) и используя независимость вариаций обобщенных координат dqS, получаем следующую систему уравнений:
![]() .
(4.30)
.
(4.30)
Для механизма с одной степенью подвижности система (4.30) сводится к одному уравнению
![]() (4.31)
(4.31)
Поскольку в этом случае ![]() ,
,
где ![]() –
скорость точки 0i, уравнение
(4.31) записывается также в форме
–
скорость точки 0i, уравнение
(4.31) записывается также в форме
![]() (4.32)
(4.32)
Отсюда следует, что сумма возможных мощностей всех активных сил и сил инерции в любой момент времени равна нулю для механизма с одной степенью подвижности при идеальных кинематических парах.
Определение движущих сил. Выделим обобщенные движущие силы из прочих активных сил, имеем
![]() (4.33), где
(4.33), где ![]() – главный вектор всех активных сил,
приложенных к i–му звену, кроме движущих, а
– главный вектор всех активных сил,
приложенных к i–му звену, кроме движущих, а ![]() – главный момент этих сил.
– главный момент этих сил.
получаем уравнения, аналогичные (4.30):
![]() . (4.34)
. (4.34)
Пример: уравнение Даламбера-Лагранжа для кривошипно-ползунного механизма:
(4.36)
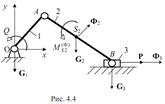
Общее уравнение динамики позволяет определить реакции всех освобождающих связей. Определить реакцию R03 в поступательной паре.
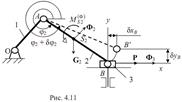 Определим связь, соответствующую этой реакции. Координата
yB будет играть роль второй входной координаты, а реакция R03
станет обобщенной «движущей» силой, соответствующей этой координате. Применим
к этому механизму общее уравнение динамики:
Определим связь, соответствующую этой реакции. Координата
yB будет играть роль второй входной координаты, а реакция R03
станет обобщенной «движущей» силой, соответствующей этой координате. Применим
к этому механизму общее уравнение динамики:
![]() При dq = 0, dyB
¹ 0 работу будут совершать только
силы, приложенные к звеньям 2 и 3:
При dq = 0, dyB
¹ 0 работу будут совершать только
силы, приложенные к звеньям 2 и 3:
![]() (4.38)
(4.38)
Из геометрических соображений (см. рис.4.11) можно получить, что
![]() (4.39)
(4.39)
Изложенный метод можно применить для определения реакции любой освобождающей связи. Что же касается неосвобождающих связей, то соответствующие им реакции в принципе невозможно определить в процессе силового расчета механизма.
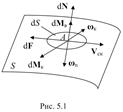
S – поверхность соприкосновения элементов кинематической пары.
Выделим на этой поверхности элементарную площадку dS
в окрестности некоторой точки A. Сила
![]() называется силой трения скольжения; момент
называется силой трения скольжения; момент ![]() – моментом трения качения, а момент
– моментом трения качения, а момент ![]() – моментом трения верчения. векторы
– моментом трения верчения. векторы ![]() и
и ![]() – противоположны по направлению соответственно
касательной
– противоположны по направлению соответственно
касательной ![]() и
нормальной
и
нормальной ![]() составляющим
вектора относительной угловой скорости. Закон Амонтона – Кулона:
составляющим
вектора относительной угловой скорости. Закон Амонтона – Кулона:
![]()
![]()
![]() (5.1)
(5.1)
где f – безразмерный коэффициент трения скольжения, а k и kВ – коэффициенты трения качения и верчения.
 (5.2)
(5.2)
Суммарная сила трения: ![]() (5.3)
(5.3)
где S – поверхность соприкосновения. Для того чтобы воспользоваться этой формулой, нужно знать закон распределения нормальных реакций по поверхности S.
 Если скорость скольжения в точке контакта и
относительная угловая скорость равны нулю, суммарные силы и моменты сил
трения в
Если скорость скольжения в точке контакта и
относительная угловая скорость равны нулю, суммарные силы и моменты сил
трения в
кинематической паре могут быть определены из условий равновесия звеньев.
F = P, MК = Pּr. (5.4)
Нарушение состояния покоя (качение): ![]() (5.5)
(5.5)
 где k – коэффициент
трения качения, то начнется качение цилиндра по плоскости без скольжения.
Скольжение начинается при нарушении условия
где k – коэффициент
трения качения, то начнется качение цилиндра по плоскости без скольжения.
Скольжение начинается при нарушении условия ![]() , (5.6), где fn – коэффициент трения покоя, обычно несколько превышающий величину коэффициента трения
скольжения f.
, (5.6), где fn – коэффициент трения покоя, обычно несколько превышающий величину коэффициента трения
скольжения f.
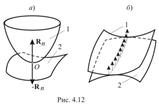 При точечном контакте абсолютно твердых звеньев и при
отсутствии сил трения реакции в кинематической паре сводятся к силе Rn,
направленной по общей нормали к контактирующим поверхностям.
При точечном контакте абсолютно твердых звеньев и при
отсутствии сил трения реакции в кинематической паре сводятся к силе Rn,
направленной по общей нормали к контактирующим поверхностям.
Такая пара является пятиподвижной, и в ней возникает одна неизвестная компонента реакции (рис.4.12, а). При линейном контакте силы взаимодействия (при отсутствии трения) распределены вдоль линии контакта и направлены в каждой точке по общей нормали к поверхностям (рис.4.12, б).
Рассмотрим некоторые примеры.
а). Расчет плоского кулачкового механизма. Рассмотрим кулачковый механизм, состоящий из кулачка 1 и поступательно движущегося толкателя 2 (рис.4.14).
 Механизм содержит две низших кинематических пары (O и B) и одну высшую (A). В плоскости движения во вращательной паре две
неизвестных компоненты реакции – R01x и R01y, в поступательной – R02
и
Механизм содержит две низших кинематических пары (O и B) и одну высшую (A). В плоскости движения во вращательной паре две
неизвестных компоненты реакции – R01x и R01y, в поступательной – R02
и ![]() ,
и в высшей кинематической паре – нормальная сила R12n= – R21n. Вместе с обобщенной силой Q
имеем шесть неизвестных. Для их отыскания можем составить шесть уравнений
кинетостатики, которые
,
и в высшей кинематической паре – нормальная сила R12n= – R21n. Вместе с обобщенной силой Q
имеем шесть неизвестных. Для их отыскания можем составить шесть уравнений
кинетостатики, которые
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
