|
Точки или звенья |
Скорости |
|||||
|
Аналитический метод |
Графоаналитический метод |
По программе |
||||
|
V |
||||||
|
X |
Y |
X |
Y |
X |
Y |
|
|
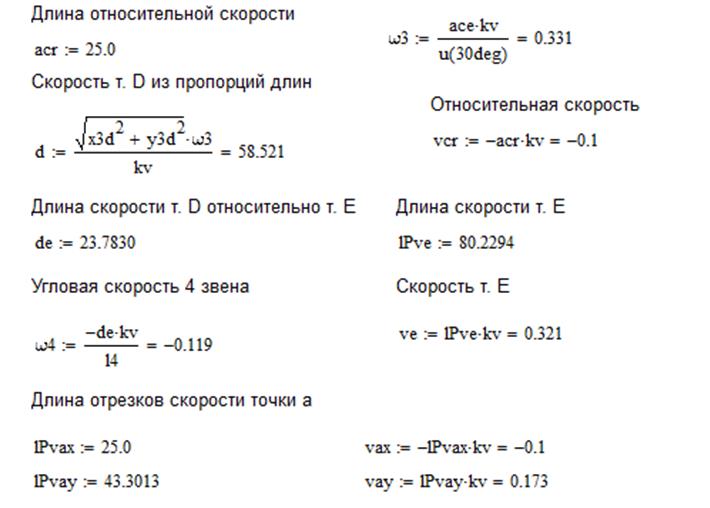
точка A |
-0.1 |
0.173 |
-0.1 |
0.173 |
-0.1 |
0.173205 |
|
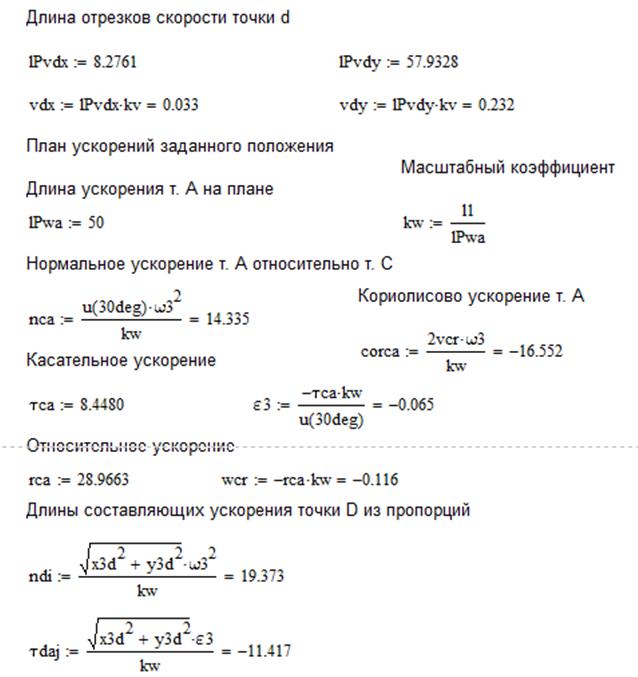
точка D |
0.033 |
0.232 |
0.033 |
0.232 |
0.033105 |
0.231732 |
|
точка E |
0 |
0.321 |
0 |
0.321 |
0 |
0.320919 |
|
ω |
||||||
|
Звено 3 |
0.331 |
0.331 |
0.331046 |
|||
|
Звено 4 |
-0.119 |
-0.119 |
-0.118915 |
|||
|
Точки или звенья |
Ускорения |
|||||
|
Аналитический метод |
Графоаналитический метод |
По программе |
||||
|
W |
||||||
|
X |
Y |
X |
Y |
X |
Y |
|
|
точка A |
-0.173 |
-0.1 |
-0.173 |
-0.1 |
-0.173205 |
-0.1 |
|
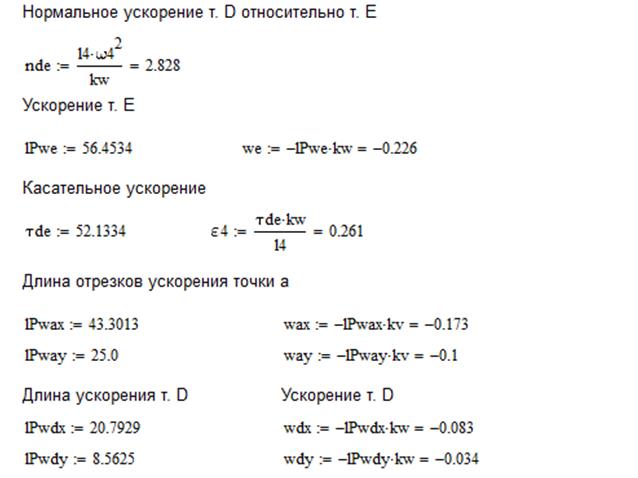
точка D |
-0.083 |
-0.034 |
-0.083 |
-0.034 |
-0.083173 |
-0.03425 |
|
точка E |
0 |
-0.226 |
0 |
-0.226 |
0 |
-0.225814 |
|
ε |
||||||
|
Звено 3 |
-0.065 |
-0.065 |
-0.06584 |
|||
|
Звено 4 |
0.261 |
0.261 |
0.260668 |
|||
|
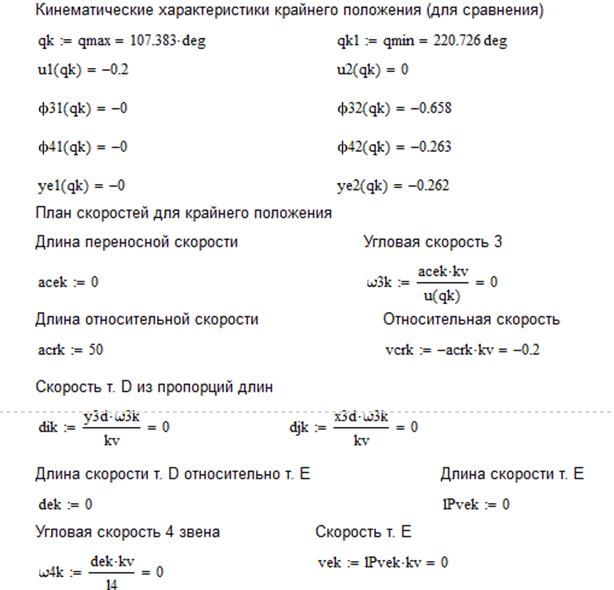
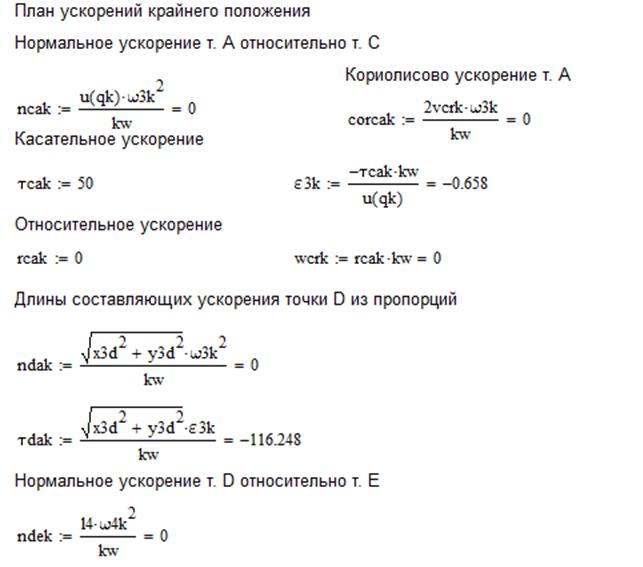
Крайнее положение |
ω3 |
ω4 |
ve |
ε3 |
ε4 |
we |
|
Аналитический |
0 |
0 |
0 |
-0.658 |
-0.263 |
-0.262 |
|
Графоаналитический |
0 |
0 |
0 |
-0.658 |
-0.263 |
-0.262 |
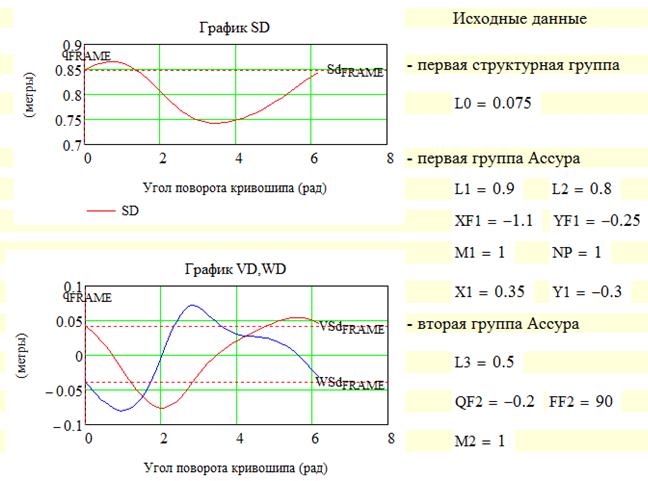
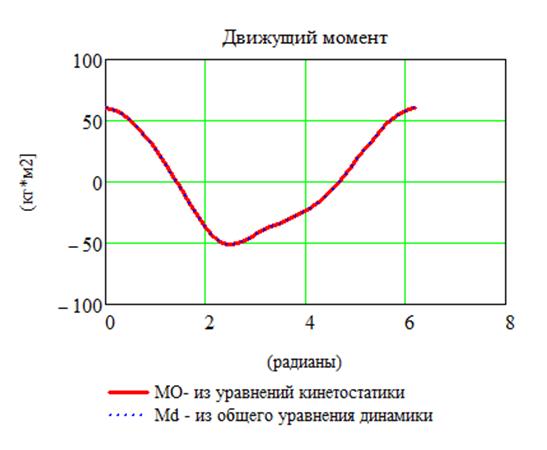
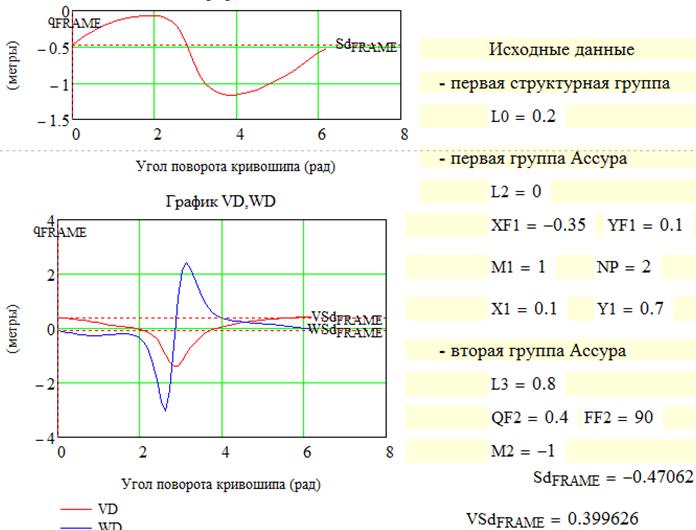
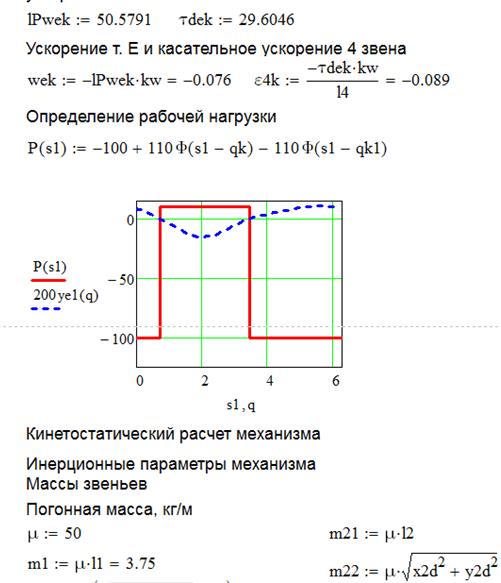
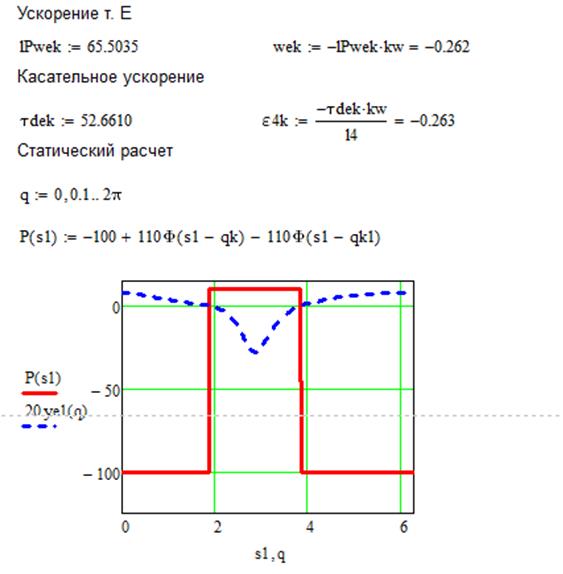
Выходное звено 5 совершает поступательное движение, поэтому
рабочая нагрузка задается в виде нагрузочной диаграммы, показанной ниже:
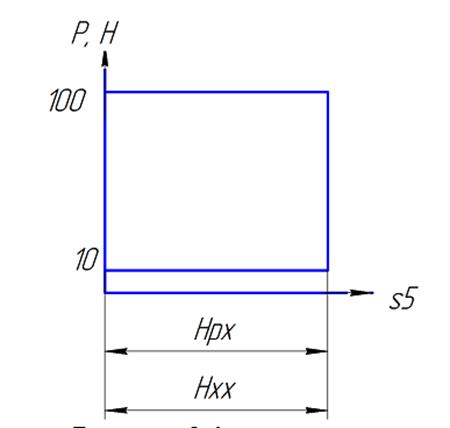
Рис. 4.1
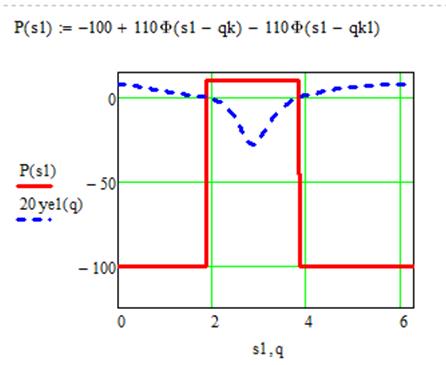
Рис. 4.2
4.1
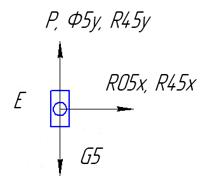
Пятое звено.
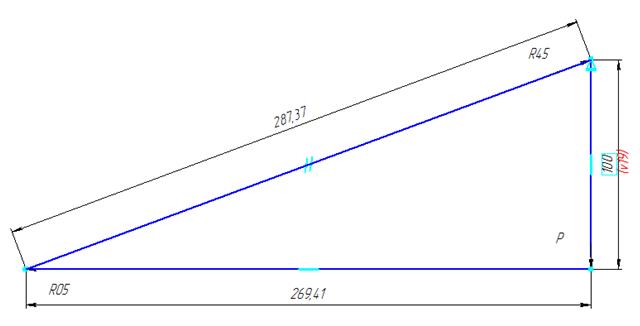
Рис. 4.3
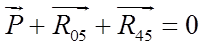
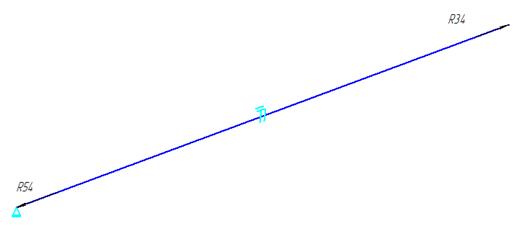
Рис. 2.4
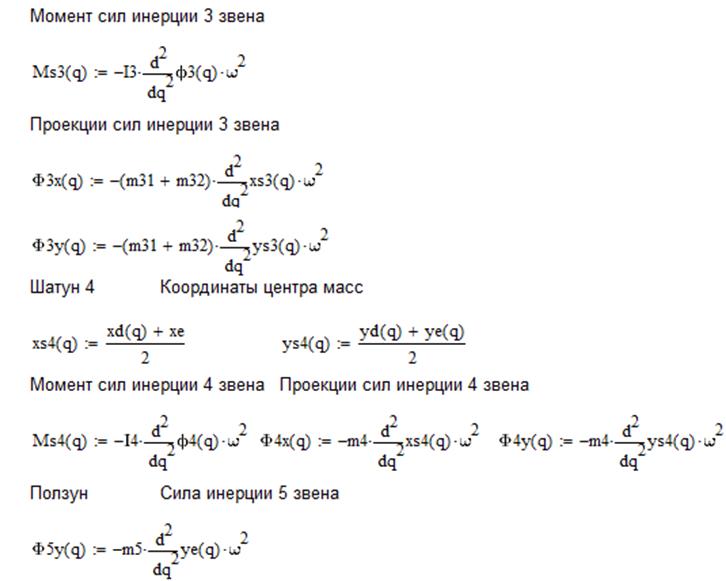
Четвертое звено
![]()
Рис. 2.5
 Рис. 2.6
Рис. 2.6
Третье звено
Второе звено
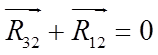
Рис . 2.7

Рис . 2.8
Кривошип
![]()
![]()
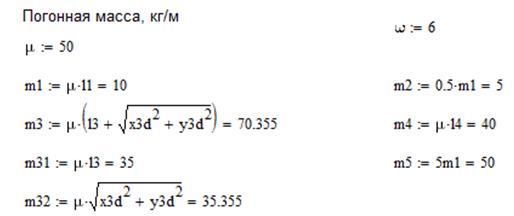
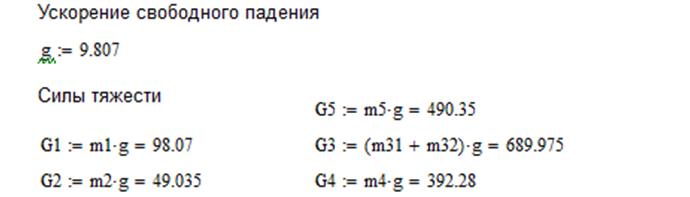
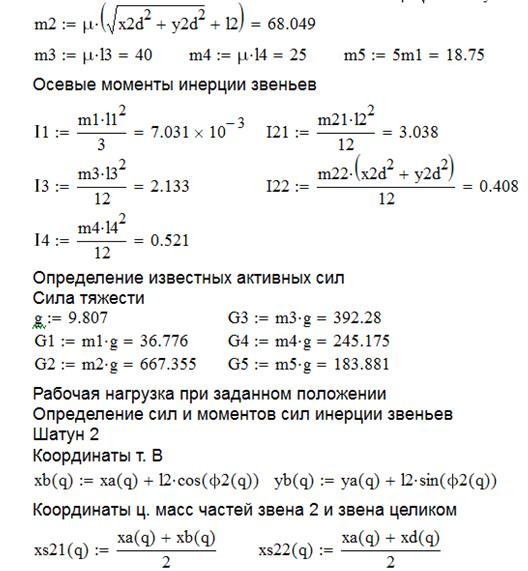
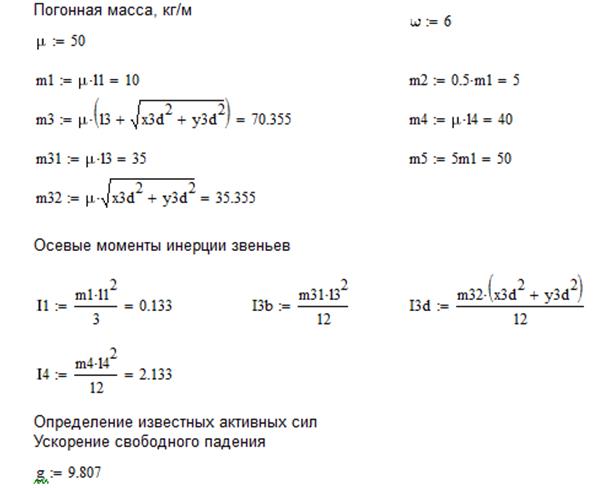
Массы звеньев:
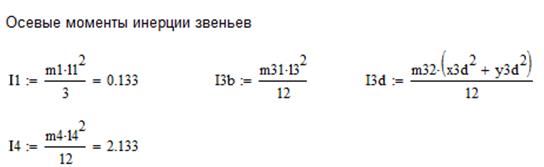
Осевые моменты инерции:
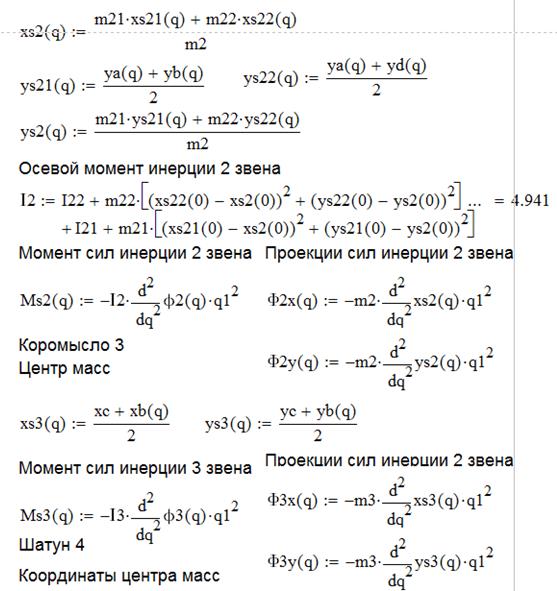
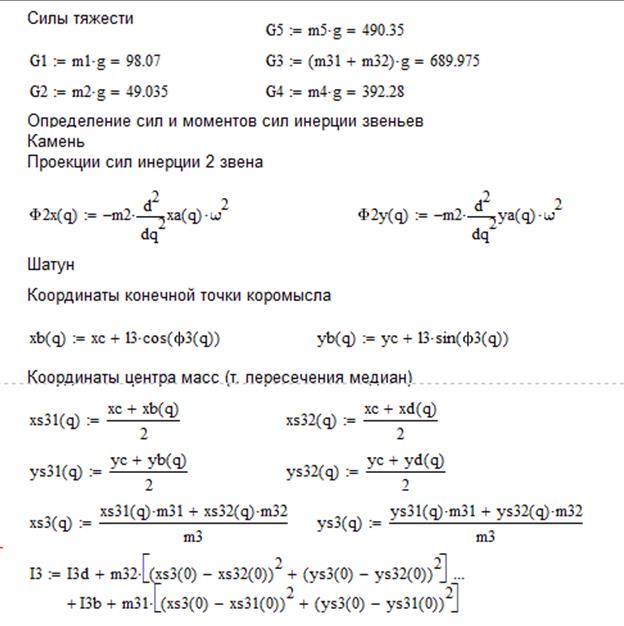
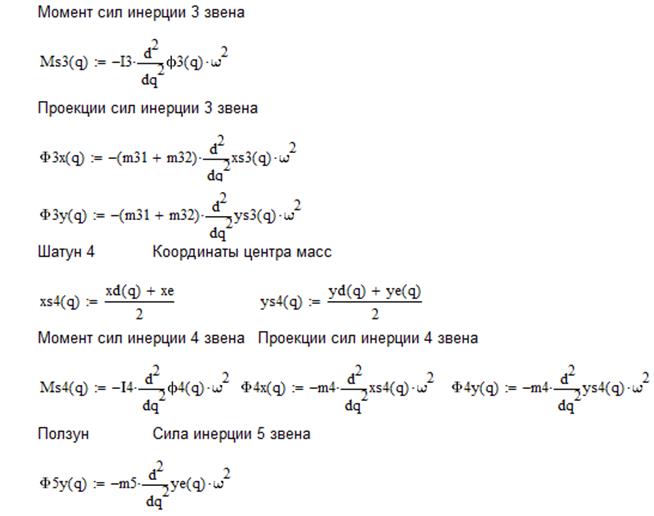
Определение сил инерции и моментов сил инерции. 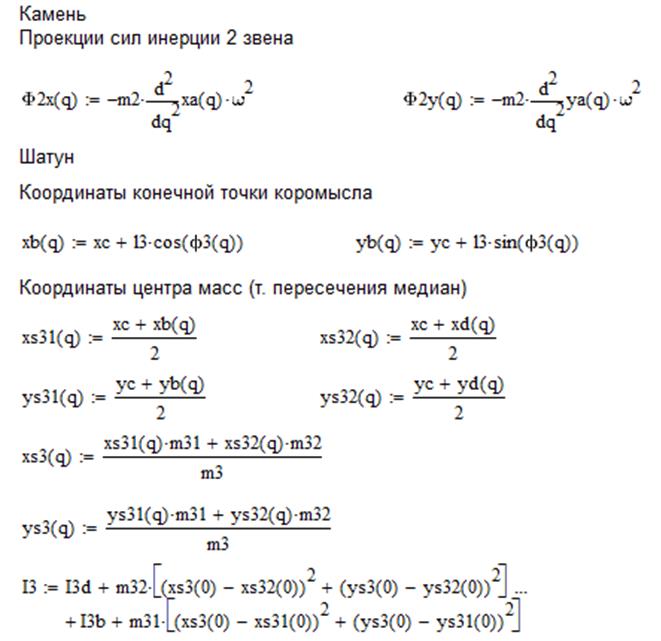
Силы тяжести
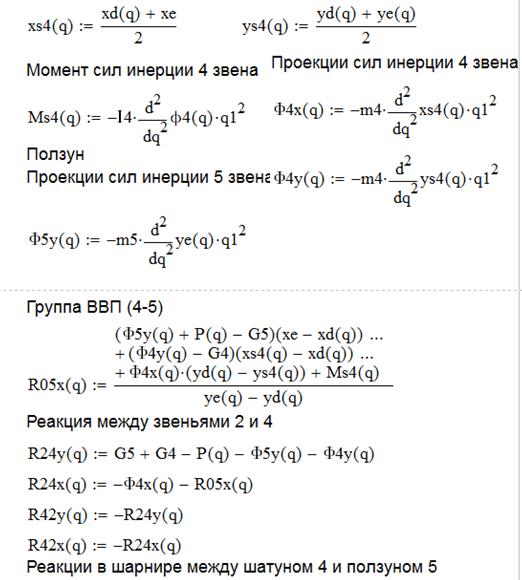
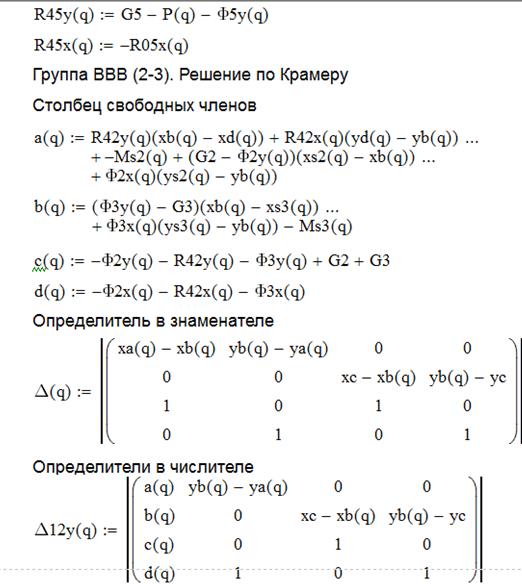
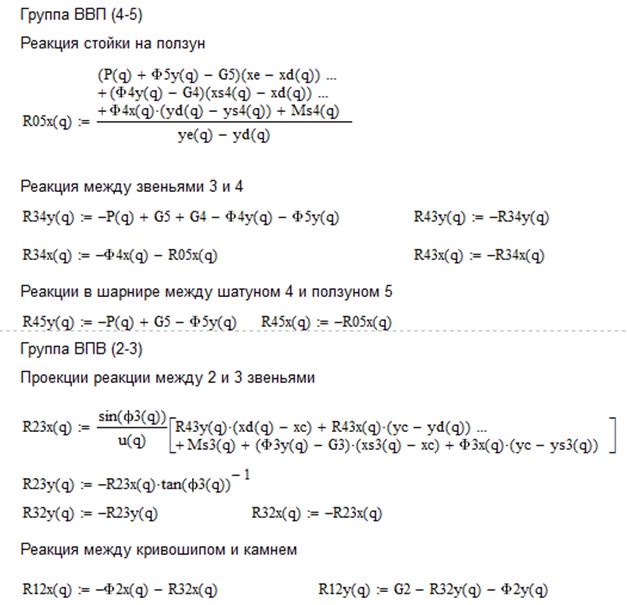
Группа ВВП(4-5 звенья)
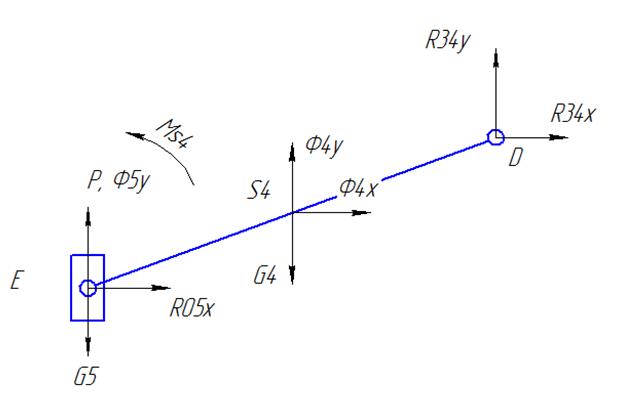
Рис. 4.3
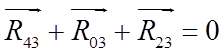
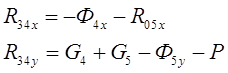
Силы, действующие на третье звено
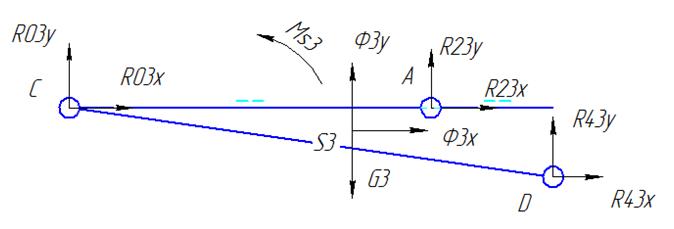
Рис. 4.4
![]()
![]()
![]()
![]()

Неизвестные: ![]() ,
, ![]() .
. 

![]()
![]()
 Неизвестные:
Неизвестные: ![]() ,
,![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
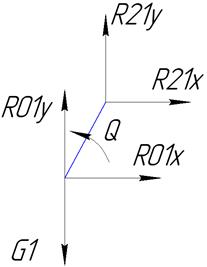
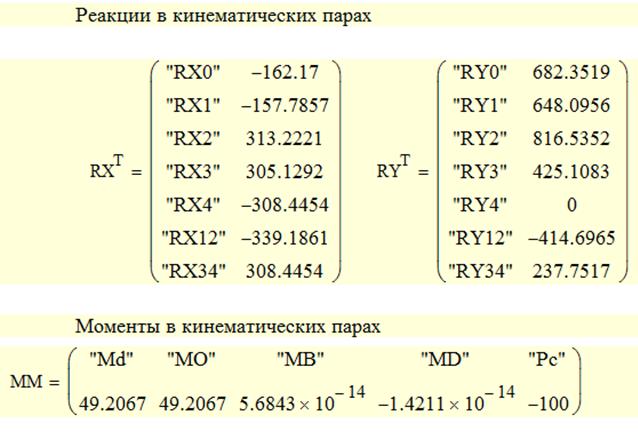
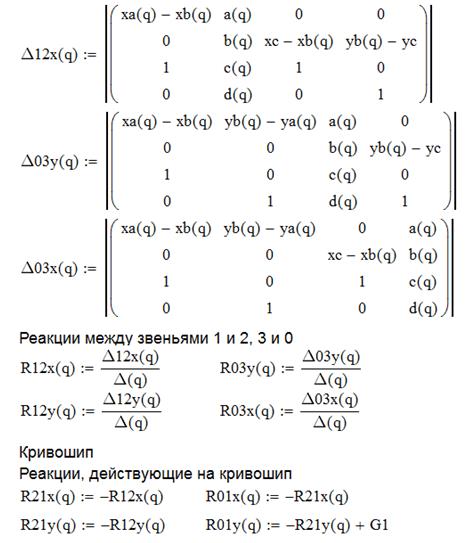
Реакции в шарнире ![]()
Рис. 4.5
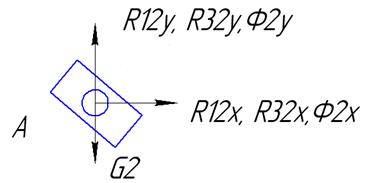
Звено 2

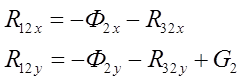 Рис.
4.6
Рис.
4.6
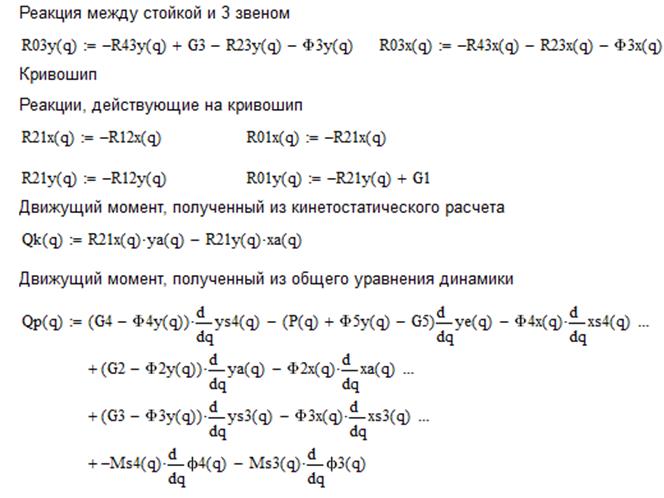
Кривошип
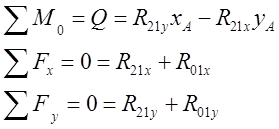
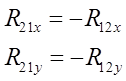
Рис. 4.7
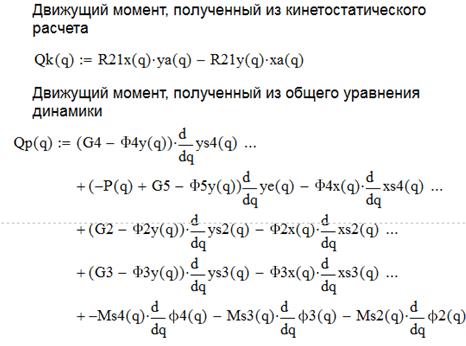
Тогда
![]()
Рис. 4.8
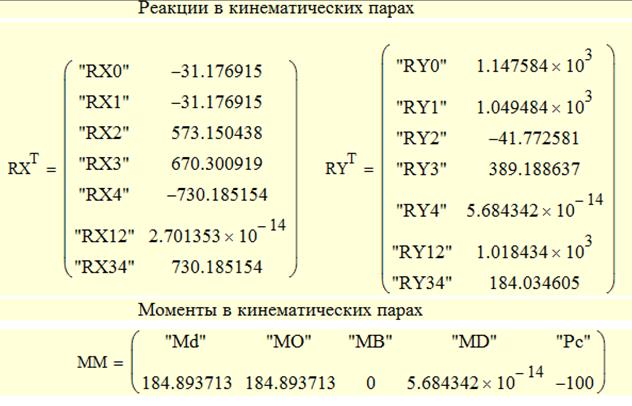
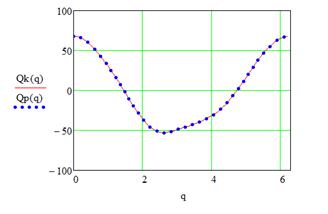
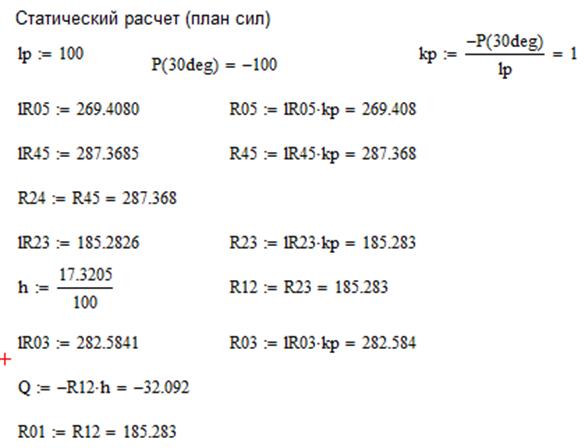
Сравнение результатов расчета со стандартной программой
|
Параметр |
Кинетостатический расчет |
Стандартная программа |
|
R05x |
-729.619 |
-730.18514 |
|
R05y |
0 |
0 |
|
R45x |
729.619 |
730.185154 |
|
R45y |
183.885 |
184.034605 |
|
R34x |
669.735 |
- |
|
R34y |
388.919 |
- |
|
R03x |
568.475 |
670.300919 |
|
R03y |
-29.7 |
-41.772581 |
|
R23x |
0 |
0 |
|
R23y |
1058.315 |
1018.434 |
|
R12x |
-31.177 |
-31.176915 |
|
R12y |
1089.35 |
1049.484 |
|
R01x |
-31.177 |
-31.176915 |
|
R01y |
1187.42 |
1147.584 |
|
Q |
191.799 |
184.893713 |
Первый механизм
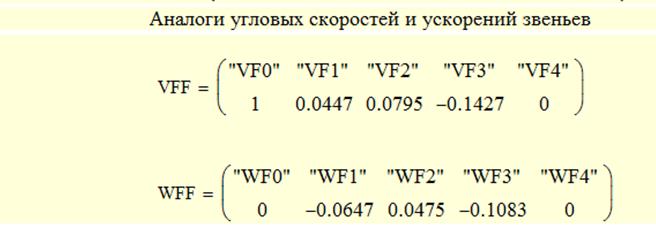
Рис. П1.1
Второй механизм
Механизм первый
Механизм 2
1. М.З.Коловский, А.Н. Евграфов. Теория механизмов и машин: учебное пособие для студ. высш. учеб.заведений. - Академия , 2006.
2. М.З.Коловский. Теория механизмов и машин. Структура и кинематика механизмов: текст лекций. - СПб.: СПбГТУ, 1993.
3. М.З.Коловский. Теория механизмов и машин. Силовой расчет. Динамические характеристики механизмов. текст лекций.-СПб.: СПбГТУ, 1994.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.