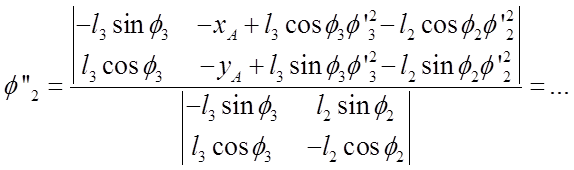

Группа ВВП (4-5 звенья)
![]()
![]()
![]()
![]()
Неизвестные: ![]() ,
, ![]() .
.

![]()
![]()
Определим скорости и ускорения графоаналитическим методом.
Свяжем с
каждым звеном векторы ![]()
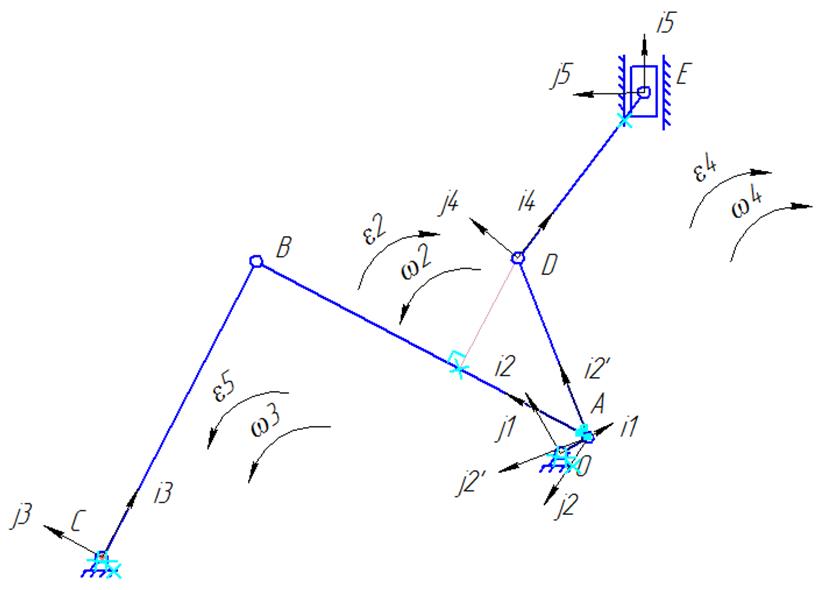
Рис. 1.8
Тогда
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
План скоростей заданного положения
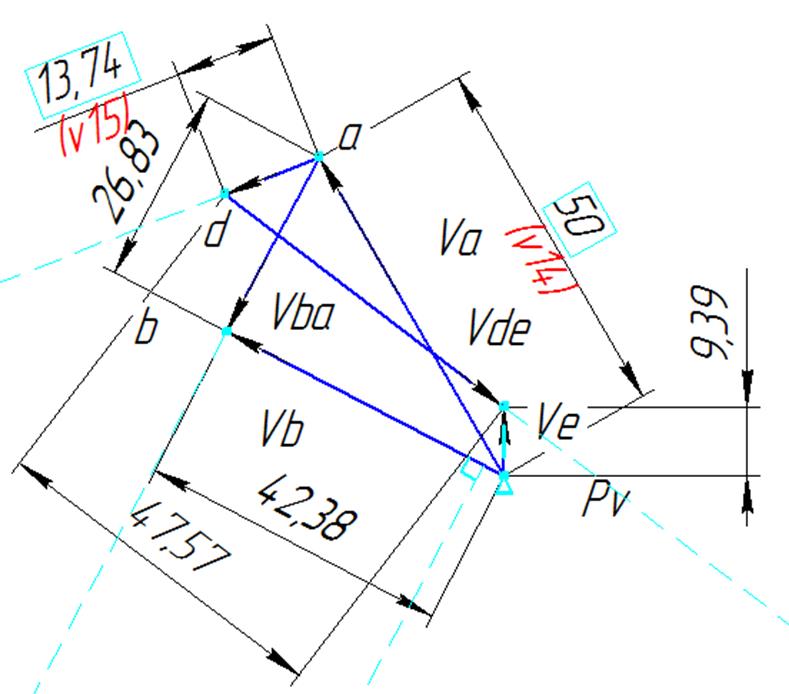
Рис. 1.9
Схема расположения
звеньев механизма в крайнем положении
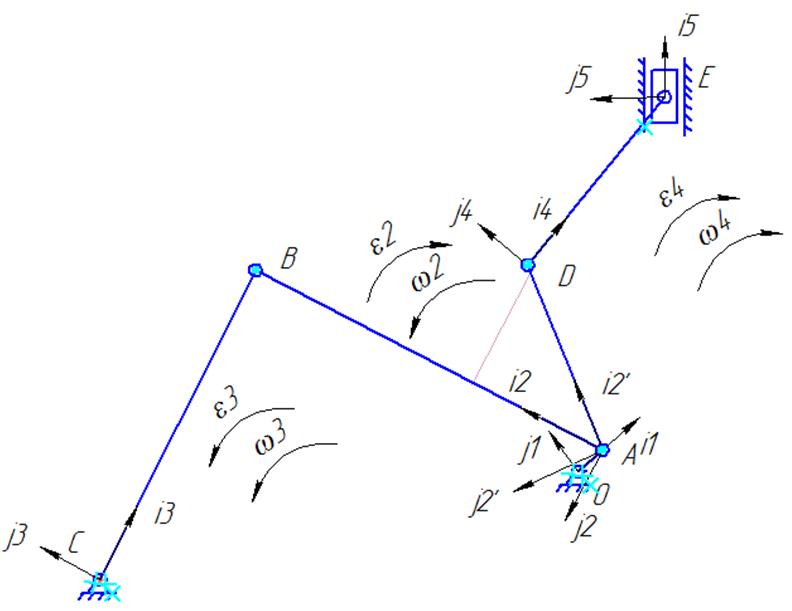
Рис. 1.10
План скоростей для крайнего положения
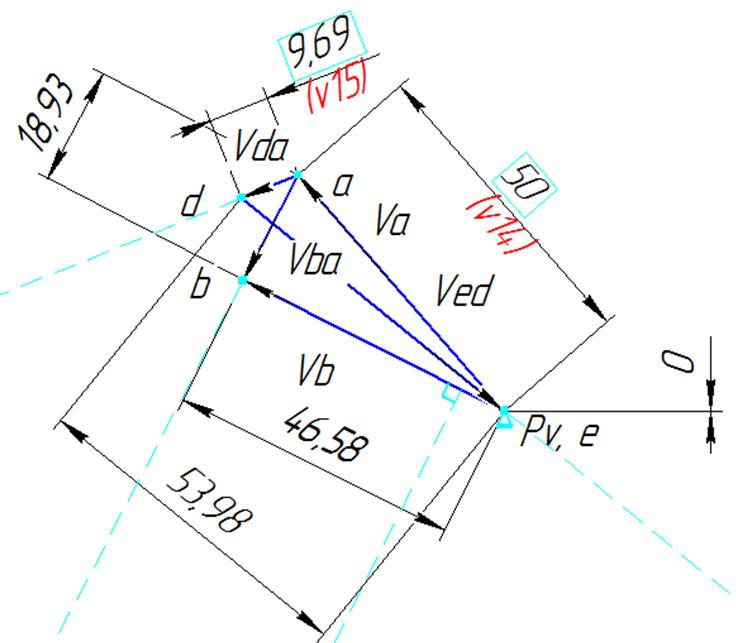
Рис. 1.11
Продифференцировав выражения для плана скоростей, получим выражения для построения плана ускорений.
![]()
![]()
![]()
![]()
План ускорений для заданного положения
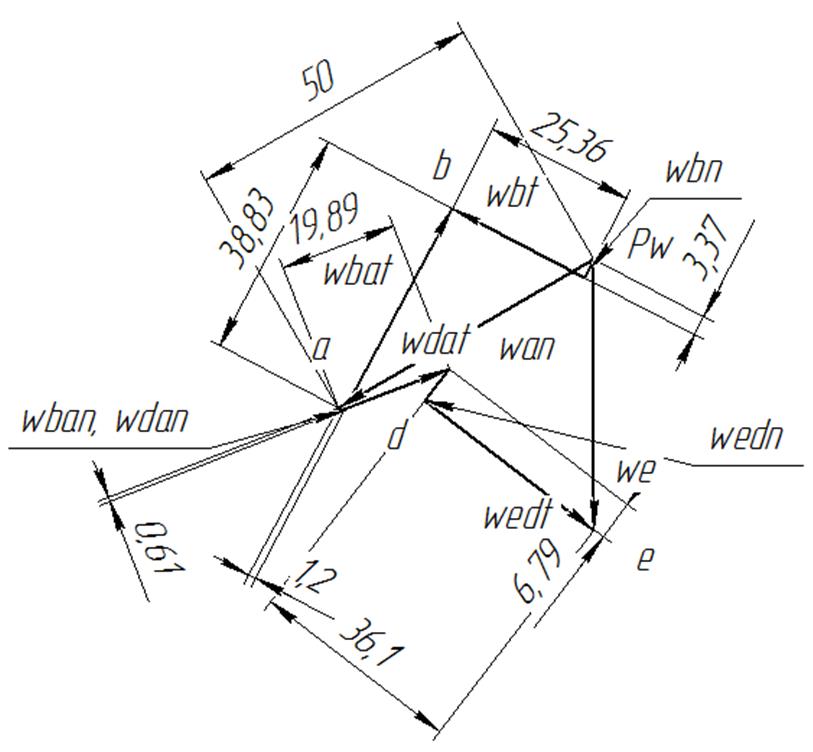
Рис. 1.12
План ускорений для
крайнего положения
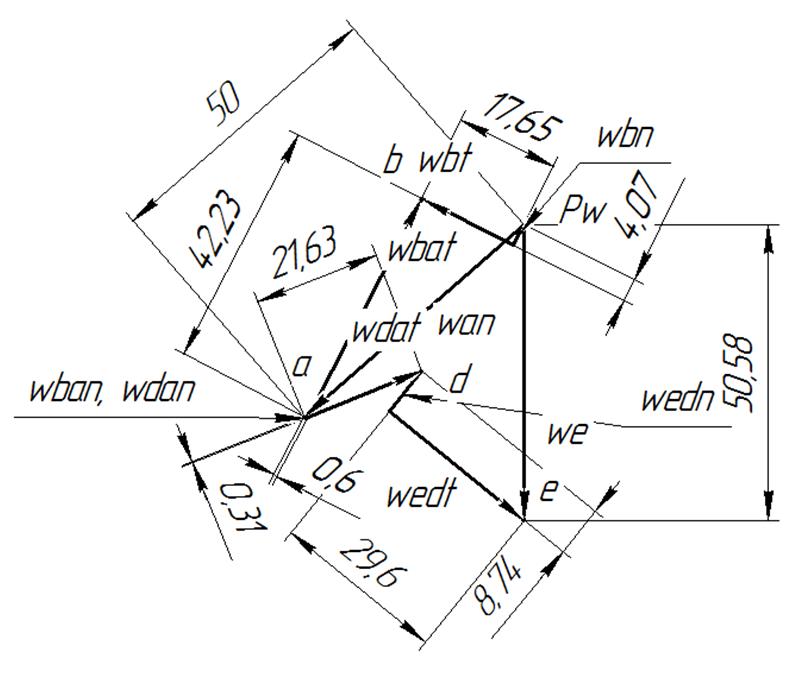
Рис. 1.13
Функция положения выходного звена, ее первая и вторая производная
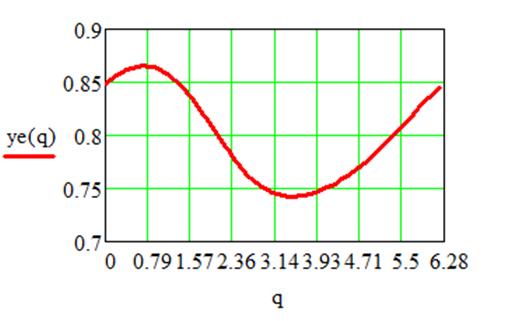
Рис. 1.14
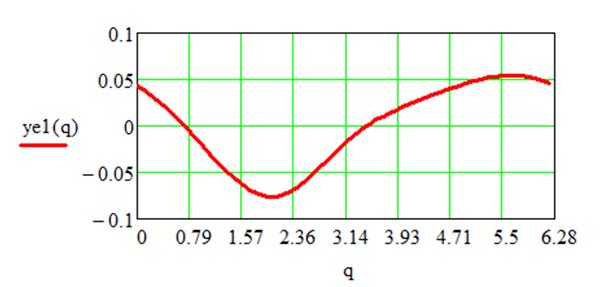
Рис. 1.15
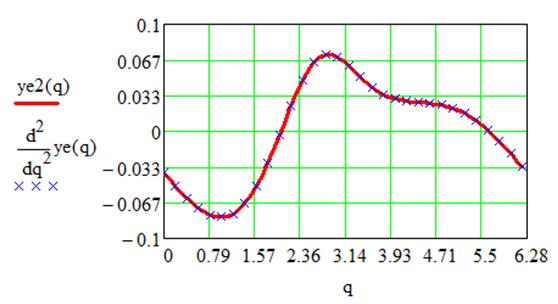
Рис. 1.16
|
Точки или звенья |
Координаты |
|||||
|
Аналитический метод |
Графоаналитический метод |
По программе |
||||
|
X |
Y |
X |
Y |
X |
Y |
|
|
точка A |
0.065 |
0.038 |
0.064952 |
0.03750 |
0.065 |
0.0375 |
|
точка D |
-0.104 |
0.467 |
-0.103612 |
0.466553 |
-0.1036 |
0.4666 |
|
точка E |
0.2 |
0.864 |
0.2 |
0.863818 |
0.2 |
0.8638 |
|
φ |
||||||
|
Звено 2 |
-207.95 |
152.050 |
- |
|||
|
Звено 3 |
62.457 |
62.4570 |
- |
|||
|
Звено 4 |
232.611 |
232.6109 |
- |
|||
|
Точки или звенья |
Скорости |
|||||
|
Аналитический метод |
Графоаналитический метод |
По программе |
||||
|
V |
||||||
|
X |
Y |
X |
Y |
X |
Y |
|
|
точка A |
-0.038 |
0.065 |
-0.038 |
0.065 |
-0.0375 |
0.065 |
|
точка D |
-0.057 |
0.057 |
-0.057 |
0.057 |
-0.0567 |
0.0574 |
|
точка E |
0.014 |
0.014 |
0.0141 |
|||
|
Ω |
||||||
|
Звено 2 |
0.045 |
0.045 |
0.0447 |
|||
|
Звено 3 |
0.07946 |
0.07946 |
0.0795 |
|||
|
Звено 4 |
-0.143 |
-0.143 |
-0.1427 |
|||
|
Точки или звенья |
Ускорения |
|||||
|
Аналитический метод |
Графоаналитический метод |
По программе |
||||
|
W |
||||||
|
X |
Y |
X |
Y |
X |
Y |
|
|
точка A |
-0.038 |
-0.065 |
-0.038 |
-0.065 |
-0.0375 |
-0.065 |
|
точка D |
-0.037 |
-0.027 |
-0.037 |
-0.027 |
-0.0368 |
-0.0274 |
|
точка E |
-0.068 |
-0.068 |
-0.0684 |
|||
|
ε |
||||||
|
Звено 2 |
-0.065 |
-0.065 |
-0.0647 |
|||
|
Звено 3 |
0.048 |
0.048 |
0.0475 |
|||
|
Звено 4 |
-0.108 |
-0.108 |
-0.1083 |
|||
|
Крайнее положение |
ω2 |
ω3 |
ω4 |
ve |
ε2 |
ε3 |
ε4 |
we |
|
Аналитический |
0.032 |
0.087 |
-0.162 |
0 |
-0.07 |
0.033 |
-0.089 |
-0.076 |
|
Графоаналитический |
0.032 |
0.087 |
-0.162 |
0 |
-0.07 |
0.033 |
-0.089 |
-0.076 |
Вторая часть курсовой работы включает в себя кинетостатический расчет механизма. Задачей кинетостатического расчета механизма является определение реакций в кинематических парах и движущего момента Q с учетом сил инерции подвижных звеньев.
1.
2.
2.1.
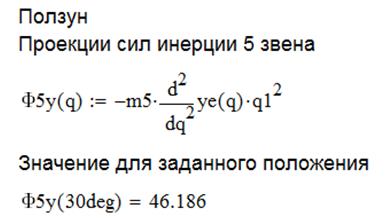
Выходное звено 5
совершает поступательное движение, поэтому рабочая нагрузка задается в виде
нагрузочной диаграммы, показанной ниже:
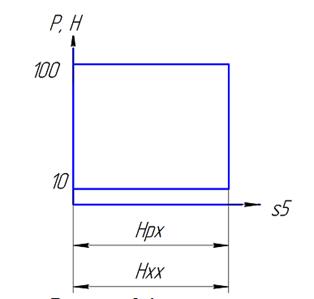
Рис. 2.1
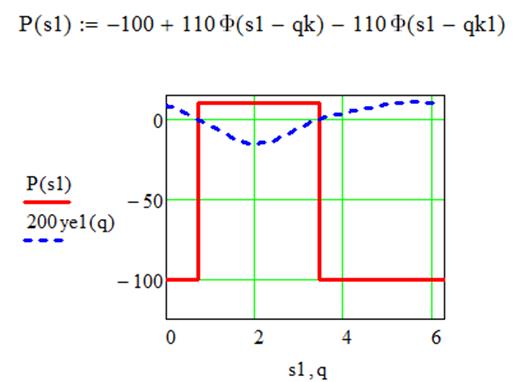
Рис. 2.2
Пятое звено.
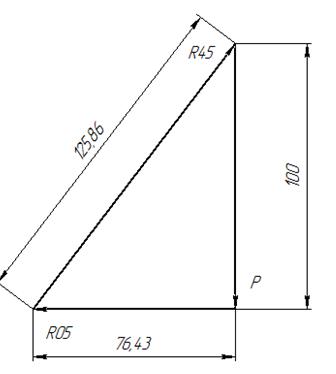
Рис. 2.3
![]()
Рис. 2.4
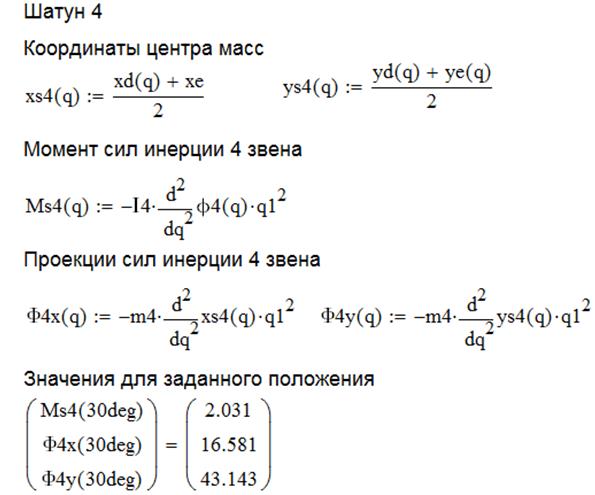
Четвертое звено
![]()
![]()
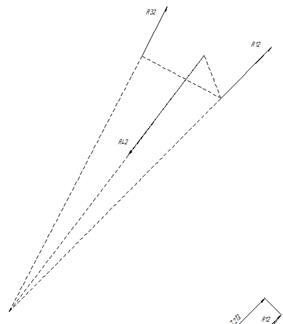
Рис. 2.5
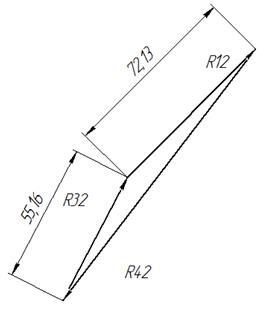
Рис. 2.6
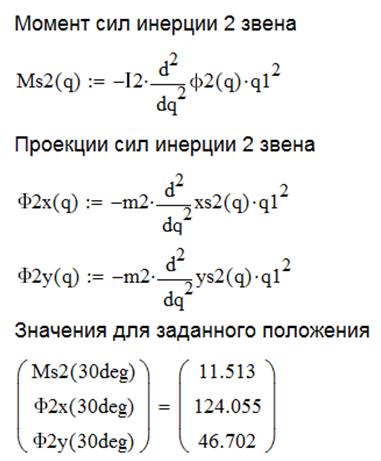
Второе звено
![]()
Кривошип
![]()
![]()
Численные результаты – см. приложение 2.
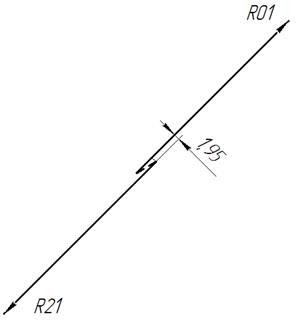
Инерционные параметры механизма
Массы звеньев:
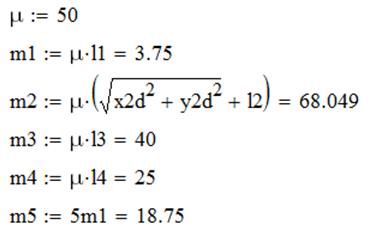
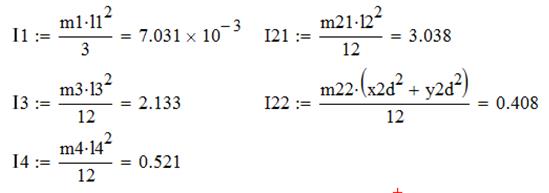
Осевые моменты инерции
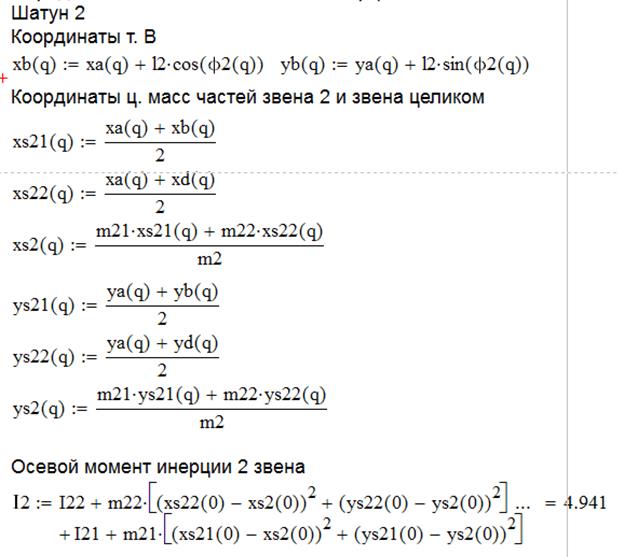
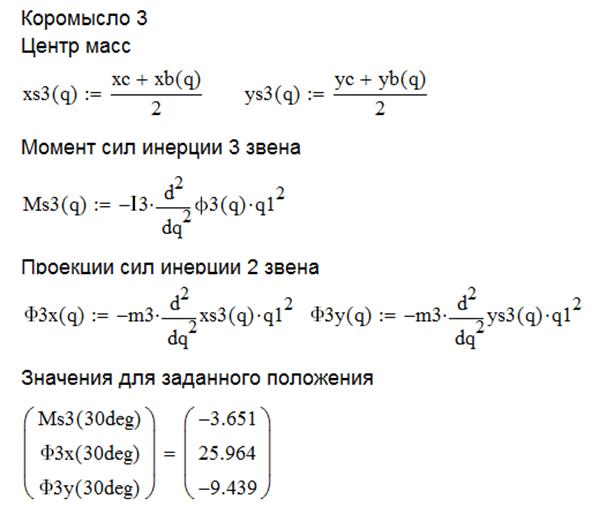
Определение координат центров масс, сил инерции и моментов сил инерции
Силы тяжести
Группа ВВП (4-5 звенья)
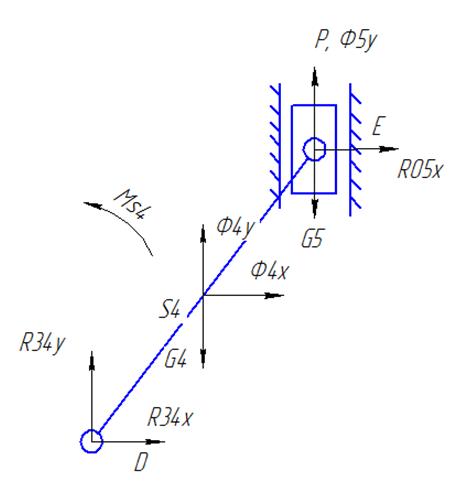
Рис. 2.3
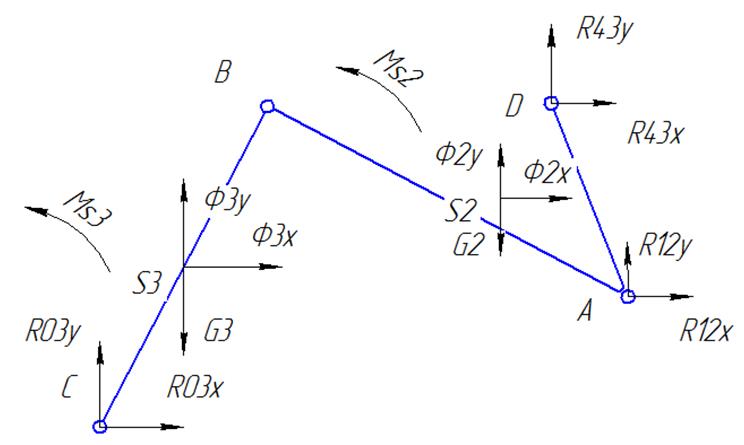
Группа ВВВ (2-3) звенья
![]()
 Рис. 2.4
Рис. 2.4
![]()
![]()
![]()
![]()
![]()

Неизвестные:
![]() ,
, ![]() ,
, ![]() ,R12x,R12y, R03x,R03y .
,R12x,R12y, R03x,R03y .
![]()

![]()
С помощью программы MathCad по методу Крамера найдем неизвестные R12x,R12y, R03x,R03y( см. Приложение 2).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.