 Если все активные силы,
приложенные к звеньям механизма, являются внутренними для машины в целом, уравновешенность
машины будет обеспечиваться при выполнении условий
Если все активные силы,
приложенные к звеньям механизма, являются внутренними для машины в целом, уравновешенность
машины будет обеспечиваться при выполнении условий
![]() ;
; ![]() , (6.12)
, (6.12)
то есть при уравновешенности сил инерции.
За меру
неуравновешенности механизма, его внешней виброактивности, естественно принять величины
главного вектора ![]() и главного момента
и главного момента ![]() его внешних реакций. Следует однако иметь
в виду, что при
его внешних реакций. Следует однако иметь
в виду, что при ![]() величина
величина ![]() зависит
от выбора центра приведения
зависит
от выбора центра приведения ![]() . Поэтому
. Поэтому ![]() может рассматриваться как мера неуравновешенности
только при фиксированном положении точки
может рассматриваться как мера неуравновешенности
только при фиксированном положении точки ![]() . Вообще
же не зависящим от центра приведения является, как известно, скалярное
произведение
. Вообще
же не зависящим от центра приведения является, как известно, скалярное
произведение ![]() .
.
В современных
быстроходных машинах уравновешивание механизма и машины в целом не решает
полностью задачу устранения внешней виброактивности. Уравновешенные силы,
приложенные к корпусу в различных точках, могут вызывать его деформации и
приводить к интенсивным колебаниям. Не следует также думать, что внутренние
активные силы, не входящие в условие (6.12), вообще не влияют на уровень внешней
виброактивности. Следует помнить, что эти силы влияют на закон движения механизма,
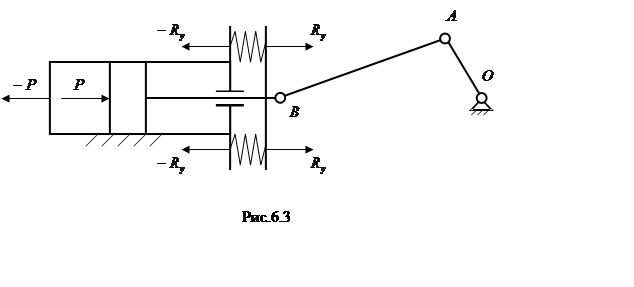
а следовательно, и на величины сил инерции. Так, например, внутренние силы ![]() и
и ![]() ,
показанные на рис.6.3, могут вызывать неравномерность вращения кривошипа
,
показанные на рис.6.3, могут вызывать неравномерность вращения кривошипа ![]() , что приведет к изменению воздействия
машины на основание.
, что приведет к изменению воздействия
машины на основание.
При анализе внешней
виброактивности плоского механизма часто ограничиваются определением
составляющих главного вектора и главного момента внешних реакций, лежащих в
плоскости движения. Если располагать оси ![]() и
и ![]() в этой плоскости, тот речь пойдет о
компонентах
в этой плоскости, тот речь пойдет о
компонентах ![]() ,
, ![]() ,
, ![]() . Для каждого положения механизма может
быть найдена прямая
. Для каждого положения механизма может
быть найдена прямая ![]() , параллельная вектору
, параллельная вектору ![]() , являющаяся линией действия
равнодействующей всех внешних реакций
, являющаяся линией действия
равнодействующей всех внешних реакций ![]() (рис.6.4).
Ее положение определяется из условия
(рис.6.4).
Ее положение определяется из условия
![]() , (6.13)
, (6.13)
где ![]() -
точка, лежащая на прямой
-
точка, лежащая на прямой ![]() (например, точка
пересечения оси
(например, точка
пересечения оси ![]() с этой прямой),
с этой прямой), ![]() - расстояние от точки до прямой
- расстояние от точки до прямой ![]() . В процессе движения механизма величина и
направление вектора
. В процессе движения механизма величина и
направление вектора ![]() изменяются, меняется также
положение прямой
изменяются, меняется также
положение прямой ![]() .
.
Установка противовесов на звеньях. Пусть все активные силы (кроме сил тяжести, влияние которых здесь учитываться не будет) являются внутренними для машины в целом. Тогда
![]() , (6.14)
, (6.14)
где ![]() -
вектор абсолютного ускорения центра масс механизма. Поскольку при плоском
движении вектор
-
вектор абсолютного ускорения центра масс механизма. Поскольку при плоском
движении вектор ![]() лежит в плоскости движения,
вектор
лежит в плоскости движения,
вектор ![]() также лежит в этой плоскости. Из (6.14)
вытекает, что первое из условий уравновешенности (6.11)
также лежит в этой плоскости. Из (6.14)
вытекает, что первое из условий уравновешенности (6.11) ![]() выполняется,
если
выполняется,
если ![]() , то есть если
, то есть если ![]() . Но для
стационарной машины скорость
. Но для
стационарной машины скорость ![]() , будучи постоянной, не
может отличаться от нуля. Таким образом, для выполнения условия
, будучи постоянной, не
может отличаться от нуля. Таким образом, для выполнения условия ![]() должно быть
должно быть ![]() , то
есть центр масс всего механизма должен оставаться неподвижным в процессе
движения. В принципе это условие можно выполнить установкой на звеньях
механизма дополнительных масс-противовесов. На рис.6.5 показан способ
уравновешивания кривошипно-ползунного механизма с помощью двух противовесов,
установленных на шатуне и кривошипе. Пусть
, то
есть центр масс всего механизма должен оставаться неподвижным в процессе
движения. В принципе это условие можно выполнить установкой на звеньях
механизма дополнительных масс-противовесов. На рис.6.5 показан способ
уравновешивания кривошипно-ползунного механизма с помощью двух противовесов,
установленных на шатуне и кривошипе. Пусть ![]() ,
, ![]() ,
, ![]() -
центры масс кривошипа, шатуна и ползуна;
-
центры масс кривошипа, шатуна и ползуна; ![]() ,
, ![]() ,
, ![]() - массы
этих звеньев;
- массы
этих звеньев; ![]() ,
, ![]() -
центры масс противовесов;
-
центры масс противовесов; ![]() . Выбрав массу
. Выбрав массу ![]() первого противовеса из условия
первого противовеса из условия
![]() ,
,
мы перенесем центр масс
системы шатун- ползун в точку ![]() . Далее речь должна идти
о приведении центра масс системы в точку
. Далее речь должна идти
о приведении центра масс системы в точку ![]() . Для
этого должно выполняться условие
. Для
этого должно выполняться условие
![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.