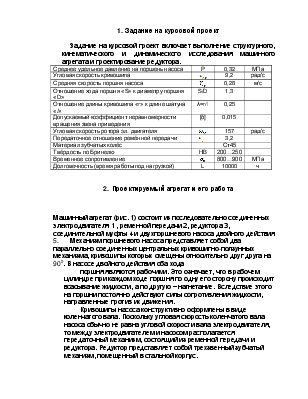
давления жидкости в цилиндрах насоса на поршни при прямых и обратных ходах. Они характеризуются средним постоянным удельным давлением Р.
Сила постоянного давления F,(Н) на поршень определяем по формуле:
где ![]() – площадь поршня насоса, м2
; D – диаметр поршня, м;
Р – среднее удельное давление, МПа.
– площадь поршня насоса, м2
; D – диаметр поршня, м;
Р – среднее удельное давление, МПа.

Располагая значением силы давления F в цилиндрах насоса, можно определить приведенные моменты сил Тпр1(j) для первого КПМ и Тпр2(j) для второго КПМ.
При изменении направления скорости движения поршня изменяется и направление силы давления на поршень. Однако, учитывая, что оба хода поршня являются рабочими, при определении приведенных моментов принимаем абсолютные значения скорости и силы давления на поршень.
Значения приведенных моментов сил давления определяем по формулам:

При определении приведенных моментов сил Тпр1(j) и Тпр2(j) пренебрегаем силами тяжести звеньев, в силу их малости по сравнению с силами давления жидкости на поршни насосов.
Суммарный приведенный момент сил производственных сопротивлений для каждого значения угла j поворота кривошипа представляет собой сумму производственных моментов сил давления жидкости на поршни двух КПМ:
![]()
Значение Тпр.ср за один цикл движения определяем по формуле:

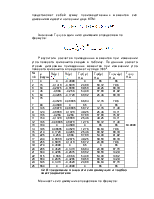
Результаты расчетов приведенных моментов при изменении угла поворота кривошипа сводим в таблицу. По данным расчета строим диаграммы приведенных моментов при изменении угла поворота кривошипа в пределах от нуля до 3600.
|
№ п/п |
j градусы |
Vв(j)
|
Vс(j)
|
Тпр1(j) Н×м |
Тпр2(j) Н×м |
Тпр.сум(j) Н×м |
Тпр.ср Н×м |
|
1 |
0 |
0 |
-0.4398 |
0 |
65 |
65 |
84.9898 |
|
2 |
15 |
-0,1413 |
-0,3973 |
20,88 |
58,72 |
79,6 |
|
|
3 |
30 |
-0,2675 |
-0,3333 |
39,53 |
49,25 |
88,79 |
|
|
4 |
45 |
-0,366 |
-0,256 |
54,08 |
37,83 |
91,92 |
|
|
5 |
60 |
-0,4285 |
-0,1723 |
63,32 |
25,46 |
88,79 |
|
|
6 |
75 |
-0,4523 |
-0,08635 |
66,84 |
12,76 |
79,6 |
|
|
7 |
90 |
-0,4398 |
0 |
65 |
0 |
65 |
|
|
8 |
105 |
-0,3973 |
0,08635 |
58,72 |
12,76 |
71,48 |
|
|
9 |
120 |
-0,3333 |
0,1723 |
49,25 |
25,46 |
74,71 |
|
|
10 |
135 |
-0,256 |
0,256 |
37,83 |
37,83 |
75,67 |
|
|
11 |
150 |
-0,1723 |
0,3333 |
25,46 |
49,25 |
74,71 |
|
|
12 |
165 |
-0,08635 |
0,3973 |
12,76 |
58,72 |
71,48 |
|
|
13 |
180 |
0 |
0,4398 |
0 |
65 |
65 |
|
|
14 |
195 |
0,08635 |
0,4523 |
12,76 |
66,84 |
79,6 |
|
|
15 |
210 |
0,1723 |
0,4285 |
25,46 |
63,32 |
88,79 |
|
|
16 |
225 |
0,256 |
0,366 |
37,83 |
54,08 |
91,92 |
|
|
17 |
240 |
0,3333 |
0,2675 |
49,25 |
39,53 |
88,79 |
|
|
18 |
255 |
0,3973 |
0,1413 |
58,72 |
20,88 |
79,6 |
|
|
19 |
270 |
0,4398 |
0 |
65 |
0 |
65 |
|
|
20 |
285 |
0,4523 |
-0,1413 |
66,84 |
20,88 |
87,73 |
|
|
21 |
300 |
0,4285 |
-0,2675 |
63,32 |
39,53 |
102,9 |
|
|
22 |
315 |
0,366 |
-0,366 |
54,08 |
54,08 |
108,2 |
|
|
23 |
330 |
0,2675 |
-0,4285 |
39,53 |
63,32 |
102,9 |
|
|
24 |
345 |
0,1413 |
-0,4523 |
20,88 |
66,84 |
87,73 |
|
|
25 |
360 |
0 |
-0,4398 |
0 |
65 |
65 |
4.2 Определение мощности сил движущих и подбор электродвигателя
Мощность сил движущих определяем по формуле:
где Рсп – мощность сил производственных сопротивлений, кВт;

hагр – КПД машинного агрегата без учета потерь в двигателе (собственные потери двигателя учитываются в его выходных параметрах).
КПД агрегата оценивается приблизительно с учетом типа соединения редуктора и насоса:
hагр = hрп ×hр ×hн ×hм , (18)
где hрп – КПД ременной передачи, hагр =0,92…0,96;
hр – КПД цилиндрического редуктора, hр =0,96;
hн – КПД насоса (при параллельном соединении кривошипно-ползунных механизмов насоса hн =0,9);
hм – КПД соединительной муфты, hм =0,98.
hагр =0,93×0,96×0,9×0,98 = 0,787

Требуемую мощность электродвигателя рассчитываем по формуле, кВт:
![]()
![]()
По мощности Рэл и заданной угловой скорости вращения wэл из Приложения А выбираем тип электродвигателя, его номинальную мощность, скорость вращения вала nном . Для дальнейших расчетов выписываем момент инерции Jр ротора, диаметр выходного вала dвых электродвигателя.
Тип электродвигателя: АОЛ2-22-4;
номинальная мощность электродвигателя: Рном = 1.5 кВт;
скорость вращения вала: nном = 1420 об/мин = 149 рад/с;
момент инерции ротора: Jр = 0,011 кг*м2 ;
диаметр выходного вала электродвигателя: dвых = 22 мм.
4.3. Приведение моментов инерции звеньев агрегата к валу кривошипа
Приведенный к валу кривошипа момент инерции звеньев определяют по формуле:
![]()
где:
Jо – средний,
приведенный к валу кривошипа момент инерции кривошипно-ползунного механизма (Jо≈
0,1…0,3 кг× м![]() )
)
Jк, Jш –
моменты инерции колеса и шестерни, кг![]() м
м![]() ;
;
Jб, Jт - моменты инерции быстроходного и тихоходного валов редуктора,
кг
×м![]() ;
;
Jэл - момент инерции ротора электродвигателя, определяемый из каталога по маховому моменту,
Jэл =0,011 кг×м![]() ,
,
![]()
Момент инерции колес определяется приближенно по формуле:
![]()
где: b – ширина зубчатого колеса, м
d – диаметр делительной окружности колеса, м
![]() - плотность материала зубчатого колеса
(для стали
- плотность материала зубчатого колеса
(для стали ![]() =7,8*10
=7,8*10![]() кг/м
кг/м![]() )
)
![]()
![]()
Моменты инерции валов оценивают приближенно по формуле:
![]()
где:
d![]() - эквивалентное
значение диаметра, м, приближенно d
- эквивалентное
значение диаметра, м, приближенно d![]() =d
=d![]() (посадочный диаметр вала
под подшипники);
(посадочный диаметр вала
под подшипники);
l![]() -
-![]() длина вала, (быстроходного – 148мм,
тихоходного – 185 мм)
длина вала, (быстроходного – 148мм,
тихоходного – 185 мм)
![]()
![]()
![]()
![]()
![]()

4.4. Определение момента инерции маховика
Момент инерции маховика определяют по формуле:
![]() - избыточная работа, Дж
- избыточная работа, Дж
![]() - допускаемое значение коэффициента
неравномерности вращения коленчатого вала.
- допускаемое значение коэффициента
неравномерности вращения коленчатого вала.
Максимальную
избыточную работу находим по диаграмме приведенных моментов путем подсчета
избыточной площади ![]() и умножаем ее на масштабные
коэффициенты К
и умножаем ее на масштабные
коэффициенты К![]() и
и![]() К
К![]() :
:
![]()
К![]() - масштабный коэффициент оси моментов сил,
Нм/мм
- масштабный коэффициент оси моментов сил,
Нм/мм
К![]() - масштабный коэффициент углов поворота,
рад/мм.
- масштабный коэффициент углов поворота,
рад/мм.

![]() =979,6455
мм
=979,6455
мм![]()
![]()

4. Расчет зубчатого редуктора
4.1 Определение допускаемых напряжений
Расчет зубчатых колес редуктора производим из условий обеспечения прочности зубьев по контактным напряжениям:
sн £ [sн]. (25)
Допускаемые контактные напряжения при расчете на выносливость:
[sн]
= ![]() ×
Zн , (26)
×
Zн , (26)
где sнlim – предел контактной выносливости поверхностей зубьев, МПа;
Sн – коэффициент безопасности;
Zн – коэффициент долговечности.
Приближенное значение предела контактной выносливости при заданной твердости поверхности зубьев НВ£350 определяем из выражения:
sнlim = 2НВ + 70 (27)
sнlim = 2×225 + 70 = 520
При заданной долговечности редуктора L = 10000 ч величина Zн = 1, а коэффициент безопасности зависит от термообработки зубчатых колес. При нормализации или улучшении рекомендуется значение Sн = 1,1.
[sн] = ![]() ×
1 = 472,7
×
1 = 472,7
sн принимаем равным 470
4.2 Расчет цилиндрической косозубой передачи
Межосевое расстояние определяем по формуле [28], мм:
где Епр – приведенный модуль упругости материала зубчатых колес, (Епр = 2,1×105 МПа);
Т2 – вращающий момент на колесе, Н×мм;
здесь Р2 – мощность, передаваемая колесом, кВт;
![]() – угловая скорость вращения колес,
– угловая скорость вращения колес, ![]() , рад/с;
, рад/с;
![]()
![]()

Кнb - коэффициент концентрации нагрузки, Кнb= 1…1,15;
yba – коэффициент ширины колеса относительно межосевого расстояния, yba = 0,3…0,5.

Величину межосевого расстояния аw округляем до ближайшего значения из ряда Rа 40 по ГОСТ 6636-69 (Rа 40…80; 85: 90; 95; 100; 105; 110; 120; 125; 130 мм, далее через 10 до 260). Величину межосевого расстояния аw округляем до 110 мм.
Приближенное значение нормального модуля определяем из выражения:
где b2 – ширина зубчатого колеса, мм;
![]()
![]()
ym – коэффициент ширины колеса по модулю, ym = 20…30.
Величину модуля mn округляем до ближайшего большего значения (по ГОСТ 9563-60 mn = 1; 1,25; 1,5; 2; 2,25; 3; 3,5; 4; 4,5; 6; 8; 10). Величину модуля mn округляем до 2,25 мм.
Предварительно угол наклона зуба β рассчитываем по формуле:
где eβ – коэффициент осевого осевого перекрытия, рекомендуется принять eβ = 1,2.

Значение угла β наклона зуба принимаем в пределах 80 ≤ β≤ 200.
Значение угла β наклона зуба принимаем равным 110.
Суммарное число зубьев шестерни и колеса:

Полученное значение zс округляем в меньшую сторону до целого числа; zс =95.
Число зубьев шестерни:

Полученное значение z1 округляем до ближайшего значения; z1 = 16.
Число зубьев колеса:
![]()
![]()
Окончательное значение угла β (с точностью до 1') определяем по формуле:

Угол β = 13о41'.
Диаметры делительных окружностей шестерни и колеса, мм:


Ширина шестерни:
![]()
![]()
5.3 Проверочный расчет по контактным напряжениям
Расчет прочности зубьев по контактным напряжениям для цилиндрической косозубой передачи выполняется по формуле:

где: zнβ- коэффициент контактной прочности косозубых передач по контактным напряжениям равен ≈ 0,85;
Т![]() – вращающий момент на шестерне, Н*мм,
– вращающий момент на шестерне, Н*мм,
![]()
или
![]()
отсюда:
Кн- коэффициент расчетной
нагрузки, К![]() =1,1…..1,20
=1,1…..1,20
aw – угол зацепления
α - угол профиля aw =α=20˚
d![]() - диаметр
делительной окружности, мм
- диаметр
делительной окружности, мм


![]()
5.4.Определение
сил, действующих в зацеплении колес.![]()
При работе агрегата зубчатые пары передают вращающий момент. При этом в зацеплении зубчатых колес возникает нормальная сила Fn, направленная по линии зацепления – общей нормали к рабочим поверхностям зубьев. Эта сила раскладывается по трем взаимно перпендикулярным направлениям. Составляющие этой силы носят названия окружной Ft, радиальной Fr, осевой Fa сил в зависимости от их направления по отношению к оси колеса.


![]()
![]()

5.5. Проектный расчет валов и предварительный выбор подшипников.
Ориентировочный размер диаметра быстроходного и тихоходного валов редуктора под соединительную муфту определяется по формуле:
где: Р – мощность на соответствующем валу, кВт;
![]() - угловая скорость вала, рад/с
- угловая скорость вала, рад/с
Полученное значение округляем до ближайшего большего из стандартного ряда, принимает:
![]()
Полученное значение округляем до ближайшего большего из стандартного ряда, принимает:
![]()
7Посадочные диаметры валов под подшипники принимаем на 2…5мм, т.е. 25 и 40 мм соответственно, а посадочные диаметры валов под зубчатые колеса – на 8…10мм больше по сравнению с диаметром под полумуфту.
Подшипники подбираем по наиболее нагруженной опоре (в которой суммарная радиальная реакция R – наибольшая). На каждой из двух опор вала устанавливают одинаковые подшипники, т.к. Fа˃0,25R (322,79˃216,99), то выбираем радиально-упорные шарикоподшипники ГОСТ 8338-75.
5.6. Определение реакции опор валов редуктора и подбор подшипников.
Для определения реакции опор А и Всоставляется расчётная схема вала, где реальный вал рассматривается как шарнирно опёртая балка, к которой приложены силы, действующие в зацеплении зубчатых колёс. Строим расчётную схему, освобождаясь от связей на ней, показываем реакции в опорах. Одна из опор вала (опора А) является шарнирно-неподвижной, а опора В – шарнирно-подвижной. Также покажем радиальные реакции RAY, RAZ, RBY и RBZ и осевую реакцию RAX. Размеры l и a определяются по эскизной компоновке редуктора, l=94,5 мм, a=47,25 мм. При этом радиальные опорные реакции считаются приложенными в точках пересечения плоскостей, а силы в зацеплении считаются приложенными на диаметре делительной окружности посредине ширины колеса.
Реакции опор в двух взаимно перпендикулярных направлениях
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.