Таким образом, данный плоский рычажный механизм обладает одной степенью свободы и является механизмом II класса. Класс механизма определяется наивысшим классом группы Ассура, входящей в данный механизм.
Построим кинематическую схему.
Рисунок 7 – Кинематическая схема
Вычислим масштабный коэффициент
длины ![]() :
:
 ,
,
где ![]() –
действительная длина кривошипа в метрах;
–
действительная длина кривошипа в метрах;
![]() –
размер кривошипа в миллиметрах принимаемый на чертеже и характеризующий длину
кривошипа на кинематической схеме.
–
размер кривошипа в миллиметрах принимаемый на чертеже и характеризующий длину
кривошипа на кинематической схеме.
 .
.
 Остальные размеры звеньев вычислим по
формуле:
Остальные размеры звеньев вычислим по
формуле:
 ,
,
где ![]() – номер
звена, для которого вычисляется длина на кинематической схеме.
– номер
звена, для которого вычисляется длина на кинематической схеме.
 ,
,
 ,
,
 ,
,
 ,
,
 .
.
Построим по заданным геометрическим параметрам
кинематическую схему механизма на формате А1 в масштабном коэффициенте ![]() .
.
Найдем линейные скорости точек звеньев для 12-ти положений механизма:
Рассмотрим ведущее звено (Рисунок 10) механизма:
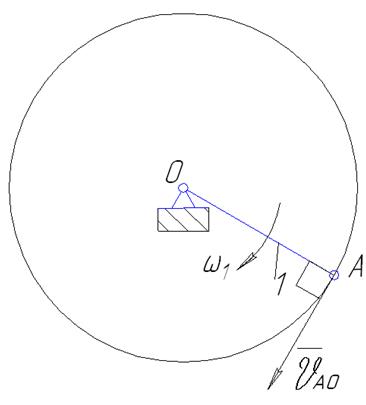
Рисунок 10
Угловую скорость первого звена найдём по формуле:
 ,
,
где ![]() –
частота вращения первого звена.
–
частота вращения первого звена.
 .
.
При вращательном движении
первого звена скорость точки А этого звена направлена перпендикулярно её
радиусу вращения по направлению ![]() и равна:
и равна:
![]() ,
,
![]()
.
Согласно определению плоскопараллельного движения, скорость любой точки этого тела будет определяться через скорость полюса следующим образом:
![]() ,
,
![]() ,
,
где ![]() –
скорость точки А;
–
скорость точки А;
![]() – скорость
точки О, взятой за полюс;
– скорость
точки О, взятой за полюс;
![]() –
скорость вращения точки А вокруг точки О.
–
скорость вращения точки А вокруг точки О.
Зададим масштабный коэффициент
скоростей ![]() :
:
 ,
,
где ![]() –
значение скорости вращения точки А вокруг точки О;
–
значение скорости вращения точки А вокруг точки О;
![]() – длина
отрезка
– длина
отрезка ![]() на плане скоростей, представляющая
скорость
на плане скоростей, представляющая
скорость ![]() на плане скоростей.
на плане скоростей.
.
Выбираем в качестве полюса плана
скоростей произвольную точку p, проводим в
выбранном масштабе вектор ![]() .
.
Для нахождения скорости точки В рассмотрим движение второго звена, взяв за полюс точку А и рассмотрим движение четвертого звена, взяв за полюс точку О1.
Тогда будем иметь:
![]() ,
,
![]() ,
,
где ![]() –
неизвестная скорость точки В;
–
неизвестная скорость точки В;
![]() –
известная по величине и направлению скорость точки А;
–
известная по величине и направлению скорость точки А;
![]() –
скорость точки В при её вращении вокруг точки А, направленная
перпендикулярно АВ
–
скорость точки В при её вращении вокруг точки А, направленная
перпендикулярно АВ ![]() .
.
![]() – скорость
точки В при её вращении вокруг точки О1, направленная
перпендикулярно О1В
– скорость
точки В при её вращении вокруг точки О1, направленная
перпендикулярно О1В ![]() .
.
Построим план скорости для седьмого положения механизма.
Решим графически векторное равенство и найдём величины ![]() и
и ![]() .
.
Измерив длины отрезков pb и ab
и умножив их на масштабный коэффициент скоростей, в котором строится план
скоростей, получим истинные значения ![]() .и
.и ![]() .
.
 ,
,
 .
.
Отрезок, изображающий вектор
скорости точки ![]() , найдем, воспользовавшись
теоремой подобия:
, найдем, воспользовавшись
теоремой подобия:

откуда
где ![]() – длина
отрезка ac на плане
скоростей;
– длина
отрезка ac на плане
скоростей;
![]() – длина
отрезка ab на плане
скоростей;
– длина
отрезка ab на плане
скоростей;
![]() – истинная
длина отрезка AС;
– истинная
длина отрезка AС;
![]() –
истинная длина второго звена AB
–
истинная длина второго звена AB
Замерив на плане скоростей
длину отрезка ![]() и подставив найденноезначение
в выражение, получим:
и подставив найденноезначение
в выражение, получим:

Отложим полученный отрезок ac на плане скоростей и соединив
точку p с точкой c получим отрезок pc
изображающий в масштабе ![]() скорость точки С,
то есть:
скорость точки С,
то есть:
 .
.
Определим скорость точки D, для этого составим векторное равенство:
![]() ,
,
![]() ,
,
где ![]() –
неизвестная скорость точки D;
–
неизвестная скорость точки D;
![]() –
известная скорость точки C;
–
известная скорость точки C;
![]() –
скорость точки D при её вращении вокруг точки C, направленная перпендикулярно DC
–
скорость точки D при её вращении вокруг точки C, направленная перпендикулярно DC ![]() .
.
Решим графически векторное
равенство и найдём величины ![]() и
и ![]() .
.
Измерив длины отрезков pd и cd и умножив их на масштабный коэффициент скоростей, в
котором строится план скоростей, получим истинные значения ![]() и
и ![]() .
.
 ,
,
 .
.
Определим угловые скорости ![]() ,
, ![]() и
и ![]() звеньев 2, 3 и 4. Величины этих скоростей
определяются из равенств:
звеньев 2, 3 и 4. Величины этих скоростей
определяются из равенств:
 ,
,
 .
.
Угловые скорости ![]() ,
, ![]() и
и ![]() направлены
в ту же сторону, куда и скорости
направлены
в ту же сторону, куда и скорости ![]() ,
, ![]() и
и ![]() .
.
Мы нашли значения и направления
линейных ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() и угловых
и угловых ![]() ,
, ![]() ,
, ![]() скоростей
для седьмого положения механизма.
скоростей
для седьмого положения механизма.
Строим планы скоростей для оставшихся положений механизма. Вычисляем истинные величины линейных и угловых скоростей для всех положений механизма и сводим их в таблицу .
Таблица 3 – Угловые и линейные скорости для двенадцати положений механизма
|
Номер положения механизма |
Скорости точек, |
Угловые скорости звеньев, |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1,5 |
0,69 |
1,62 |
0,81 |
0,12 |
0,81 |
2,31 |
2,31 |
1,72 |
|
1 |
1,5 |
0,12 |
1,8 |
0,42 |
0,39 |
0,21 |
2,57 |
0,6 |
0,3 |
|
2 |
1,5 |
0,78 |
1,53 |
0,9 |
0,69 |
0,48 |
2,18 |
1,37 |
1,95 |
|
3 |
1,5 |
1,56 |
0,87 |
1,59 |
1,23 |
1,23 |
1,24 |
3,51 |
1,4 |
|
4 |
1,5 |
1,77 |
0,3 |
1,77 |
0,87 |
1,62 |
0,43 |
4,63 |
4,42 |
|
5 |
1,5 |
1,74 |
0,54 |
1,74 |
1,05 |
1,8 |
0,77 |
5,14 |
4,35 |
|
6 |
1,5 |
1,26 |
0,87 |
1,38 |
0,72 |
1,74 |
1,24 |
4,97 |
3,15 |
|
7 |
1,5 |
0 |
1,8 |
0,39 |
0,12 |
0,33 |
2,57 |
0,94 |
0 |
|
8 |
1,5 |
1,41 |
2,28 |
1,2 |
1,29 |
1,44 |
3,25 |
4,11 |
3,52 |
|
9 |
1,5 |
1,89 |
1,53 |
1,74 |
0,9 |
1,65 |
2,18 |
4,71 |
4,72 |
|
10 |
1,5 |
1,92 |
0,3 |
1,89 |
1,29 |
1,8 |
0,43 |
5,14 |
4,8 |
|
11 |
1,5 |
1,35 |
1,02 |
1,44 |
0,78 |
1,35 |
1,45 |
3,85 |
3,37 |
Рассмотрим сначала
движение ведущего звена ОА и определим ускорение точки А. Так как
кривошип ОА совершает равномерное вращательное движение (![]() ), то точка А этого кривошипа будет
иметь только нормальное ускорение, равное по величине:
), то точка А этого кривошипа будет
иметь только нормальное ускорение, равное по величине:

Направлено ускорение ![]() к оси вращения О.
к оси вращения О.
Масштабный коэффициент ускорений:
 ,
,
где ![]() –
истинное значение нормального ускорения точки А, при вращении вокруг
точки О;
–
истинное значение нормального ускорения точки А, при вращении вокруг
точки О;
![]() – длина
отрезка pa на плане
ускорений, представляющая ускорение
– длина
отрезка pa на плане
ускорений, представляющая ускорение ![]() на плане ускорений.
на плане ускорений.
 .
.
Выбираем в качестве полюса плана
ускорений произвольную точку p, из точки p в выбранном масштабе проведем
вектор ![]() .
.
Рассмотрим движение второго звена.
![]() ,
,
где ![]() –
ускорение точки В;
–
ускорение точки В;
![]() –
ускорение точки А;
–
ускорение точки А;
![]() –
ускорение точки В при её вращении вокруг точки А.
–
ускорение точки В при её вращении вокруг точки А.
Ускорение ![]() можно представить в виде:
можно представить в виде:
![]() ,
,
где ![]() – нормальное ускорение точки В
при её вращении вокруг точки А. Проведем расчеты угловых ускорений для седьмого
положения механизма:
– нормальное ускорение точки В
при её вращении вокруг точки А. Проведем расчеты угловых ускорений для седьмого
положения механизма:
 .
.
![]() – тангенциальное ускорение точки В
при её вращении вокруг точки
– тангенциальное ускорение точки В
при её вращении вокруг точки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.