






21) Устройство и принцип действия доплеровских измерителей скорости и углов сноса.
ДИСС предназначены для определения составляющих вектора скорости объекта относительно поверхности, отражающей электромагнитные колебания. Принцип действия ДИСС основан на использовании эффекта Доплера, который заключается в изменении частоты принимаемых электромагнитных колебаний при относительном движении приемника и передатчика колебаний. Тот же эффект проявляется, если передатчик и приемник неподвижны относительно друг друга и находятся на движущемся объекте, а колебания принимаются после отражения от неподвижного объекта или поверхности.
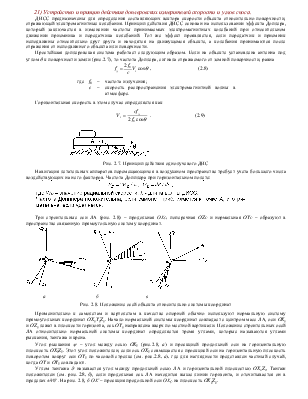
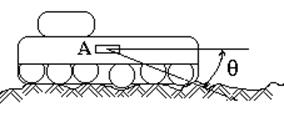
Простейшая доплеровская система работает следующим образом. Если на объекте установлена антенна под углом q к поверхности земли (рис.2.7), то частота Доплера, сигнала отражаемого от земной поверхности, равна
![]() , (2.8)
, (2.8)
|
где |
f0 |
– |
частота излучения; |
|
с |
– |
скорость распространения электромагнитной волны в атмосфере. |
Горизонтальная скорость в этом случае определяется как
 . (2.9)
. (2.9)
 |
Навигация летательных аппаратов перемещающихся в воздушном пространстве требует учета большего числа воздействующих на него факторов. Частота Допплера при горизонтальном полете:

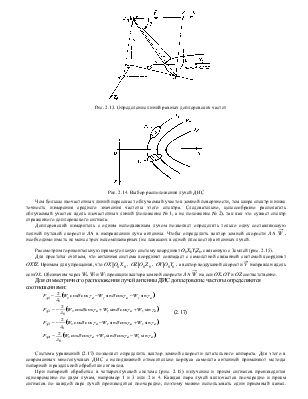
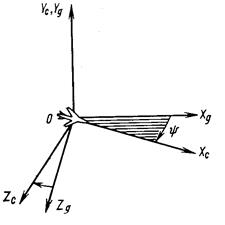
Три строительные оси ЛА (рис. 2.8) – продольная ОХС, поперечная OZC и нормальная OYC – образуют в пространстве связанную прямоугольную систему координат.
а б в
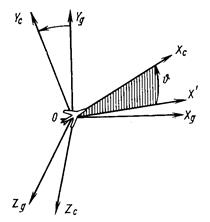
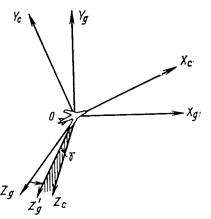
Рис. 2.8. Положение осей объекта относительно системы координат
Применительно к самолетам и вертолетам в качестве опорной обычно используют нормальную систему прямоугольных координат OXgYgZg. Начало нормальной системы координат совпадает с центром масс ЛА, оси OXg и OZg лежат в плоскости горизонта, ось OYg направлена вверх по местной вертикали. Положение строительных осей ЛА относительно нормальной системы координат определяется тремя углами, которые называются углами рыскания, тангажа и крена.
Угол рыскания y – угол между осью OXg (рис.2.8, а) и проекцией продольной оси на горизонтальную плоскость OXgZg. Этот угол положителен, если ось OXg совмещается с проекцией оси на горизонтальную плоскость поворотом вокруг оси OYg по часовой стрелке (см. рис.2.8, а), где для наглядности представлен частный случай, когда OY и OYg совпадают.
Углом тангажа J называется угол между продольной осью ЛА и горизонтальной плоскостью OXgZg. Тангаж положителен (см. рис. 2.8, б), если продольная ось ЛА находится выше линии горизонта, и отсчитывается он в пределах ±90°. На рис. 2.8, б ОХ' – проекция продольной оси ОХС на плоскость OXgZg.
Угол крена g – это угол между поперечной осью ЛА OZC и осью OZ'g, которая представляет собой смещенное положение оси OZg, соответствующее нулевому углу рыскания (см. рис. 2.8, в). Когда правое крыло ЛА находится ниже горизонтальной плоскости, то крен считается положительным.
В ряде случаев необходимо знать угловое положение какой-либо точки, например местоположение РНТ относительно продольной оси ЛА. При горизонтальном полете ЛА, который рассматриваем для простоты (рис. 2.9), угол, отсчитываемый в горизонтальной плоскости по часовой стрелке от продольной оси ЛА до направления на РНТ, называют курсовым углом РНТ (КУР). На рисунке ОСи – северное направление истинного меридиана.
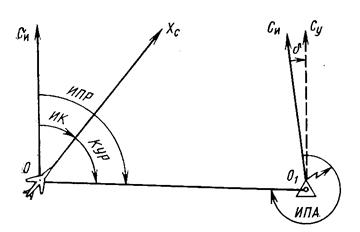
Рис. 2.9. Навигационные элементы:
О1Си – северное направление истинного меридиана точки О1; O1Cy – северное направление условного меридиана точки О1 (ОхСу параллельна ОСи).
В зависимости от направления, выбранного в качестве начала отсчета, различают курсы истинный, магнитный и т.д. Истинный курс (ИК) отсчитывается по часовой стрелке от северного направления истинного меридиана, магнитный – от северного направления магнитного меридиана.
Вертикальная
составляющая вектора ![]() представляет собой скорость
подъема или спуска ЛА. Основные соотношения между элементами навигационного
треугольника скоростей поясняются с помощью рис. 2.10. Для простоты рисунка
полет ЛА считается горизонтальным.
представляет собой скорость
подъема или спуска ЛА. Основные соотношения между элементами навигационного
треугольника скоростей поясняются с помощью рис. 2.10. Для простоты рисунка
полет ЛА считается горизонтальным.
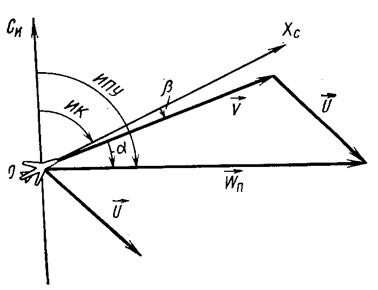
Рис.2.10. Навигационный треугольник: a – угол сноса; ИПУ – истинный путевой угол; b – угол скольжения
Под путевым углом (ПУ) понимается угол в горизонтальной плоскости, заключенный между северным направлением соответствующего меридиана и вектором путевой скорости. В навигации различают заданный путевой и фактический путевой углы. Путевые углы могут быть истинными или магнитными в зависимости от того, какое направление принимается за начало отсчета (географический или магнитный меридианы). Если специально не оговорено, то обычно рассматривается истинный путевой угол (ИПУ).
Углом сноса a называется угол, заключенный между
вектором воздушной скорости и вектором путевой скорости. Если угол сноса
применительно к точке О отсчитывается от вектора ![]() вправо,
то a считается положительным, если – влево, то
отрицательным.
вправо,
то a считается положительным, если – влево, то
отрицательным.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.