Угол скольжения b представляет собой угол в горизонтальной плоскости между вектором воздушной скорости и плоскостью симметрии ЛА. Он обусловлен неравенством тяги двигателей, несимметрией конструкции и т.п. Для современных самолетов угол b мал и с ним часто не считаются. При полете на вертолетах этот угол может быть большим и его приходится учитывать. В таком случае имеет место соотношение
ИК + b + a = ИПУ.
Для самолетов (когда b»0) равенство упрощается:
ИК + a = ИПУ.
Рассмотрим принцип определения вектора скорости летательного аппарата с помощью доплеровского измерителя скорости.
Число
составляющих вектора полной путевой скорости объекта ![]() ,
определяемых ДИС, зависит от числа лучей, формируемых антенной системой, а
также от метода обработки принятых по этим лучам сигналов. При определении
,
определяемых ДИС, зависит от числа лучей, формируемых антенной системой, а
также от метода обработки принятых по этим лучам сигналов. При определении ![]() минимально необходимое число лучей равно
трем. Если число лучей меньше трех, то требуется изменение положения ДН антенн
в пространстве (например, за счет поворота антенн).
минимально необходимое число лучей равно
трем. Если число лучей меньше трех, то требуется изменение положения ДН антенн
в пространстве (например, за счет поворота антенн).
Рассмотрим случай, когда радиосигнал частотой w0 излучается однолучевой направленной антенной из точки О (рис. 2.11) и отражается в точке М от участка земной поверхности бесконечно малых размеров, т.е. от точечного отражателя. Для простоты считаем, что ЛА перемещается горизонтально.
Излучаемый сигнал имеет вид
![]() ,
(2.10)
,
(2.10)
где Um – амплитуда сигнала.
Радиосигнал отражается от земной поверхности в точке М и принимается в точке О, равен
 ,
(2.11)
,
(2.11)
|
где |
Uпр |
– |
амплитуда принятого сигнала; |
|
с |
– |
скорость распространения радиоволн; |
|
|
Д(t) |
– |
текущее значение расстояния между ЛА и отражающей точкой в момент времени t, т.е. между ЛА и точной М; |
|
|
|
– |
сдвиг фазы сигнала из-за конечного времени распространения tз радиоволн от точки О до точки М и обратно; |
|
|
jотр |
– |
полная фаза отраженного сигнала. |
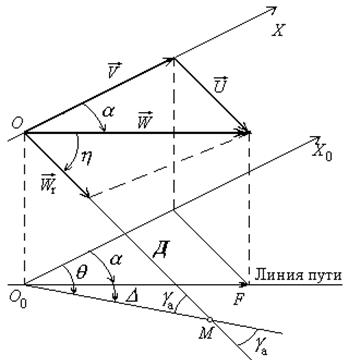
Рис. 2.11. Принцип работы однолучевого доплеровского измерителя скорости
На рис. 2.11 обозначено:
|
ОМ |
направление луча визирования ДИС; |
|
|
О0М |
– |
проекция на горизонтальную плоскость луча визирования; |
|
q |
– |
азимут луча визирования; |
|
gа |
– |
угол места луча визирования; |
|
|
– |
проекция вектора полной путевой скорости |
|
|
– |
вектор воздушной скорости ЛА; |
|
D |
– |
угол между линией пути и прямой О0М; |
|
a |
– |
угол сноса; |
|
h |
– |
угол между вектором |
|
|
– |
вектор скорости ветра; |
|
ОХ |
– |
направление продольной оси ЛА; |
|
О0Х0 |
– |
проекция ОХ на поверхность земли; |
|
О0 |
– |
проекция точки О на поверхность земли. |
Мгновенное значение частоты принимаемых колебаний w определяется соотношением
 , (2.12)
, (2.12)
где круговая доплеровская частота
![]() , (2.13)
, (2.13)
или
![]() .
(2.14)
.
(2.14)
При получении (2.14) учтено,
что так как ЛА приближается к точке М, то величина ![]() . Из рис. 2.11 находим, что
. Из рис. 2.11 находим, что
![]() . (2.15)
. (2.15)
Отсюда с учетом (2.14) находим
 . (2.16)
. (2.16)
Из (2.14) видно, что величина
Fд зависит от cosh. В частности  при h = 0° или 180°, т.е. когда вектор
при h = 0° или 180°, т.е. когда вектор ![]() направлен на точку М или в
противоположную сторону относительно этой точки. Когда луч визирования ОМ
направлен перпендикулярно вектору полной путевой скорости, т.е. h = 90° или 270°, то частота Fд = 0.
направлен на точку М или в
противоположную сторону относительно этой точки. Когда луч визирования ОМ
направлен перпендикулярно вектору полной путевой скорости, т.е. h = 90° или 270°, то частота Fд = 0.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.