|
|
|
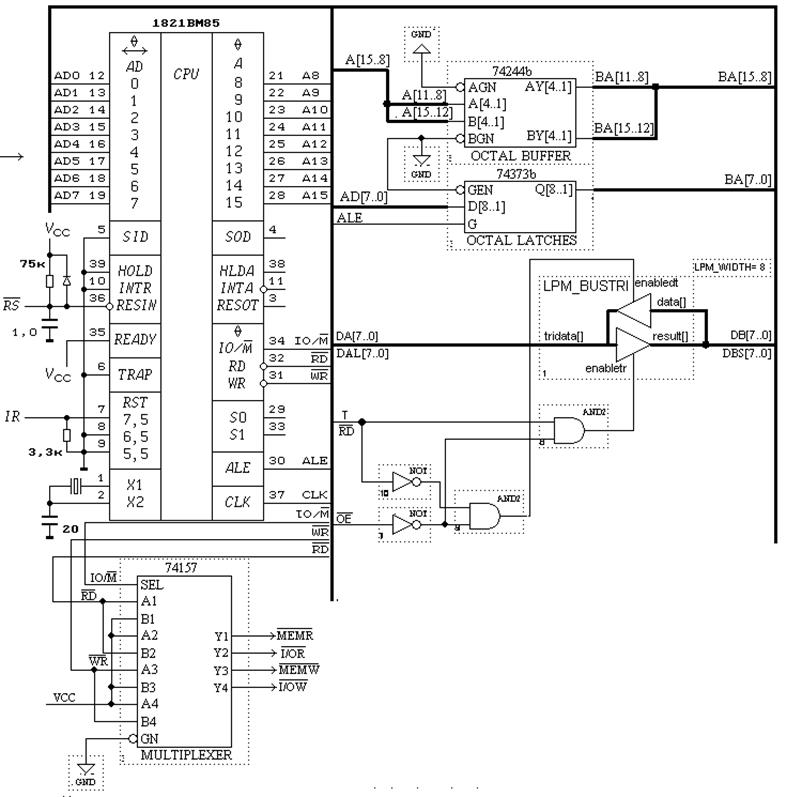
Рис.3. Принципиальная схема процессорного блока на МЭ. |
![]() (IO/Memory), указывающего на обращение CPU к
внешнему устройству (
(IO/Memory), указывающего на обращение CPU к
внешнему устройству (![]() ) или к памяти (
) или к памяти (![]() );
);
![]() (Read) – сигнал чтения внешнего устройства
I/O или памяти;
(Read) – сигнал чтения внешнего устройства
I/O или памяти;
![]() (Write) – сигнал записи данных в память или
I/O;
(Write) – сигнал записи данных в память или
I/O;
READY – сигнал готовности, поступающий от I/O или памяти;
HOLD – сигнал запроса прямого доступа к памяти, поступающий от контроллера DMA (DirectMemoryAccess – прямой доступ к памяти);
HLDA (HoldAcknowledge) – сигнал подтверждения прямого доступа к памяти, подаваемый на контроллер DMA;
INTR (InterruptRequest) – сигнал запроса прерывания высоким уровнем (INTR = 1), поступающий от внешнего устройства или контроллера прерываний 580ВН59;
![]() (InterruptAcknowledge) – выходной сигнал подтверждения
прерывания, подаваемый на внешнее устройство или контроллер прерываний 580ВН59;
(InterruptAcknowledge) – выходной сигнал подтверждения
прерывания, подаваемый на внешнее устройство или контроллер прерываний 580ВН59;
RST 5.5, RST 6.5, RST 7.5 (Restart) – входы маскируемых запросов прерывания для вызова подпрограмм, расположенных по фиксированным адресам 5.5 × 8d = 2Ch, 6.5 × 8d = 34h и 7.5 × 8d = 3Ch (d и h – указатели десятичной и 16-ричной систем счисления); управление маской осуществляется двумя командами: RIM (ReadInterruptMask) – чтение маски прерываний и SIM (SetInterruptMask) – установка маски прерываний; сигналы RST 5.5 и RST 6.5 запрашивают прерывание высоким уровнем, а сигнал RST 7.5 – положительным фронтом;
TRAP – вход запроса немаскированного прерывания положительным фронтом с последующим удержанием высокого уровня; этот запрос прерывания имеет наивысший приоритет (приоритеты остальных входов запросов прерывания уменьшаются в последовательности RST 7.5, RST 6.5, RST 5.5 и INTR); адрес передачи управления равен 4.5 × 8d = 24h;
![]() (ResetIn) – входной сигнал системного сброса;
(ResetIn) – входной сигнал системного сброса;
RESOT (ResetOut) – выходной сигнал системного сброса;
X1, X2 – входы для подключения кварцевого резонатора;
CLK (Clock) – тактовый сигнал CPU (f0 £ 3,6 МГц);
SID (SerialInputDataLine), SOD (SerialOutputDataLine) – вход и выход канала последовательной передачи данных.
Сигналы A15–0, AD7–0,
![]() ,
, ![]() и
и ![]() находятся в Z-состоянии во время
выполнения прямого доступа к памяти (HOLD = 1), в течение системного
сброса (
находятся в Z-состоянии во время
выполнения прямого доступа к памяти (HOLD = 1), в течение системного
сброса (![]() ) и при останове CPU (S1 = S0 = 0). Все прерывания, кроме TRAP,
запрещаются командой DI и разрешаются командой EI. Частота внутреннего
тактового сигнала и внешнего сигнала CLK в два раза меньше частоты
кварцевого резонатора.
) и при останове CPU (S1 = S0 = 0). Все прерывания, кроме TRAP,
запрещаются командой DI и разрешаются командой EI. Частота внутреннего
тактового сигнала и внешнего сигнала CLK в два раза меньше частоты
кварцевого резонатора.
|
|
|
|
а |
б |
|
|
|
|
в |
|
|
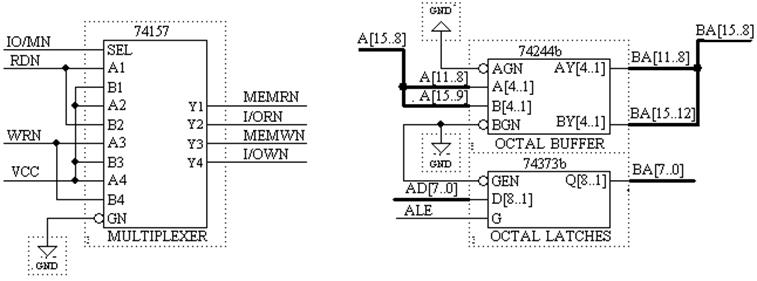
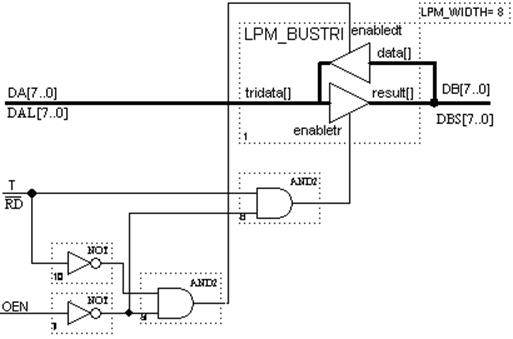
Рис.4. МЭ процессорного блока: формирователь сигналов управления (а), формирователи сигналов шины адреса (б) и приемопередатчик (в) |
|
На рис. 5
представлена структурная схема имитатора сигнала, параметры которого (периоды ![]() , скорости движения цели
, скорости движения цели ![]() а также направление движения)
вводятся с клавиатуры
а также направление движения)
вводятся с клавиатуры
|
|
|
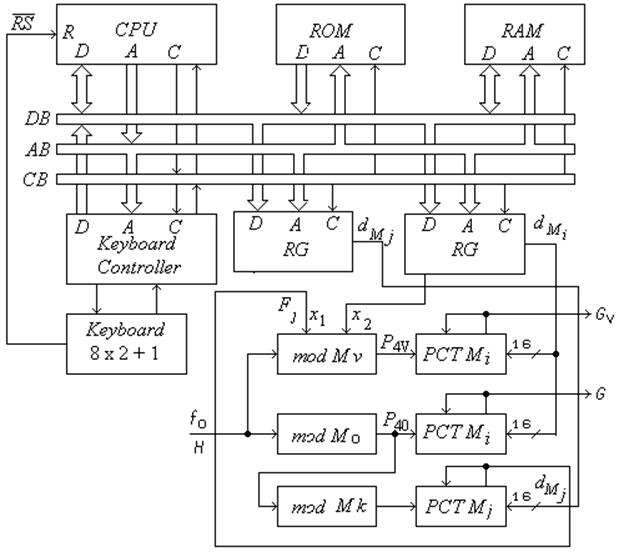
Рис. 5. Структурная схема имитатора. |
Имитатор
содержит два канала для формирования неподвижного зондирующего сигнала ![]() и подвижного отраженного сигнала
и подвижного отраженного сигнала ![]() . Неподвижный сигнал формируется
путем деления частоты
. Неподвижный сигнал формируется
путем деления частоты ![]() в
в ![]() раз для получения заданного значения периода
раз для получения заданного значения периода ![]() . Общий модуль пересчета
. Общий модуль пересчета ![]() реализуется двумя счетчиками по
реализуется двумя счетчиками по ![]() и
и ![]() . Подвижный сигнал формируется путем
деления частоты
. Подвижный сигнал формируется путем
деления частоты ![]() счетчиком с тремя модулями пересчета
счетчиком с тремя модулями пересчета
![]() ,
, ![]() и
и ![]() , которые переключаются сигналами
, которые переключаются сигналами ![]() (направление движения) и
(направление движения) и ![]() (скорость движения, задаваемая значением частоты
(скорость движения, задаваемая значением частоты ![]() ), и счетчиком по
), и счетчиком по ![]() . Для построения программируемых
счетчиков PCT (ProgrammableCounter) по
. Для построения программируемых
счетчиков PCT (ProgrammableCounter) по ![]() . можно использовать макроэлементы
счетчиков из библиотеки пакета.
. можно использовать макроэлементы
счетчиков из библиотеки пакета.
Частота ![]() вычисляется по заданной скорости
движения цели
вычисляется по заданной скорости
движения цели ![]() (м/с). Скорость перемещения сигнала
(м/с). Скорость перемещения сигнала ![]() относительно сигнала
относительно сигнала ![]() равна
равна ![]() (
(![]() в мкс,
в мкс, ![]() в Гц). Цель за время
в Гц). Цель за время ![]() проходит расстояние
проходит расстояние ![]() , а свет расстояние
, а свет расстояние ![]() проходит за время
проходит за время ![]() , где
, где ![]() – скорость света. Из этого следует, что
– скорость света. Из этого следует, что ![]()
![]() (
(![]() в м/с,
в м/с, ![]() в мкс). Для получения этих частот из частоты
в мкс). Для получения этих частот из частоты ![]() необходимо использовать счетчик по
необходимо использовать счетчик по ![]() , где
, где ![]() .
.
Для
программирования модулей пересчета счетчиков по ![]() и
и ![]() необходимо производить запись в них
чисел
необходимо производить запись в них
чисел ![]() и
и ![]() , выдаваемых CPU по шине данных. Эти
числа должны храниться в ПЗУ.
, выдаваемых CPU по шине данных. Эти
числа должны храниться в ПЗУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.