|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
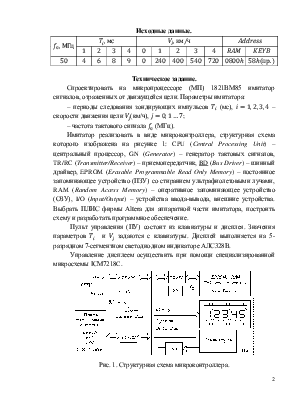
Спроектировать на микропроцессоре (МП) 1821ВМ85 имитатор сигналов, отраженных от движущейся цели. Параметры имитатора:
– периоды
следования зондирующих импульсов ![]() (мс),
(мс), ![]() – скорости движения цели
– скорости движения цели ![]() (км/ч),
(км/ч), ![]() ;
;
– частота
тактового сигнала ![]() (МГц).
(МГц).
Имитатор реализовать в виде микроконтроллера, структурная схема которого изображена на рисунке 1: CPU (CentralProcessingUnit) – центральный процессор, GN (Generator) – генератор тактовых сигналов, TR/RC (Transmitter/Receiver) – приемопередатчик, BD(BusDriver) – шинный драйвер, EPROM (ErasableProgrammableReadOnlyMemory) – постоянное запоминающее устройство (ПЗУ) со стиранием ультрафиолетовыми лучами, RAM (RandomAccessMemory) – оперативное запоминающее устройство (ОЗУ), I/O (Input/Output) – устройства ввода-вывода, внешние устройства. Выбрать ПЛИС фирмы Altera для аппаратной части имитатора, построить схему и разработать программное обеспечение.
Пульт
управления (ПУ) состоит из клавиатуры и дисплея. Значения параметров ![]() и
и ![]() задаются с клавиатуры. Дисплей
выполняется на 5-разрядном 7-сегментном светодиодном индикаторе АЛС328В.
задаются с клавиатуры. Дисплей
выполняется на 5-разрядном 7-сегментном светодиодном индикаторе АЛС328В.
Управление дисплеем осуществить при помощи специализированной микросхемы ICM7218C.
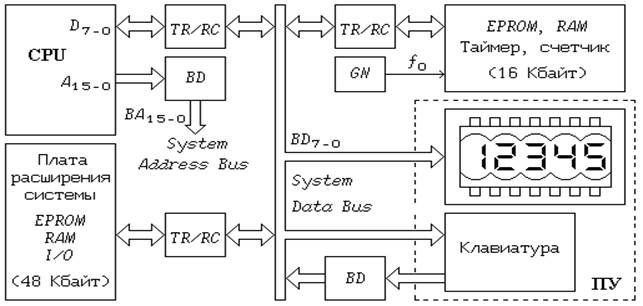
Рис. 1. Структурная схема микроконтроллера.
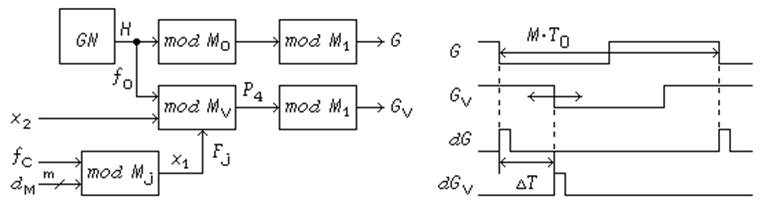
Имитатор радиолокационного сигнала предназначен для проверки работоспособности и настройки устройств обработки сигналов в радиолокационных системах. На рисунке 2a изображена структурная схема имитатора радиолокационных сигналов: G – сигнал, из которого формируется зондирующий импульс dG; GV – сигнал, из которого формируется импульс dGV отраженный от движущейся цели. Эти сигналы имеют период повторения T = M×T0, где M = M0×M1, T0 = 1/f0 – период тактового сигнала H (рис. 1.1, б).
|
|
|
|
а |
б |
|
Рис.2. Схема имитатора радиолокационного сигнала. |
|
Задачей имитатора является сдвиг временного положения импульсов dGV относительно импульсов dG на время T0 при воздействии каждого перехода сигнала x1 с 1 на 0 (сдвиг производится по команде dx1 = 1, где d – оператор логического дифференцирования [1]). Направление сдвига определяется значением сигнала x2. Если сигнал x1 имеет постоянную частоту Fj = F/Mj, то сигнал dGV будет перемещаться по отношению к сигналу dG с постоянной скоростью, что соответствует имитации цели, движущейся с фиксированной радиальной скоростью.
Основным
узлом такого имитатора является счетчик с программируемым модулем пересчета MV = M0, M0
– 1, M0 + 1 [2]. Действительно, если при dx1
= 0 модуль пересчета MV = M0, то частоты сигналов G и GV равны, разность их фаз (разность ![]() временных положений сигналов dG и dGV) определяет задержку отраженного
сигнала по отношению к зондирующему, т.е. эта разность содержит информацию о
дальности до цели. При подаче управляющего сигнала dx1 = 1
счетчик переключается с модуля M0 на M0 – 1
или M0 + 1 в зависимости от значения другого управляющего
сигнала x2, что приводит к появлению переноса P4
на один такт раньше или позже, чем при модуле пересчета M0.
Чем выше частота f0 тактового сигнала, тем меньше
дискретность квантования фазы (дальности до цели) и тем выше качество
имитатора. Задачей курсовой работы является проектирование имитатора сигналов,
параметры которых задаются нажатием клавиш клавиатуры имитатора. Ввод в
микроЭВМ кода нажатой клавиши производится программным методом с квитированием
или по прерыванию. По коду клавиши идентифицируется ее назначение и
производится соответствующее управление работой счетчиков, обеспечивающих
заданные параметры сигналов G и GV.
временных положений сигналов dG и dGV) определяет задержку отраженного
сигнала по отношению к зондирующему, т.е. эта разность содержит информацию о
дальности до цели. При подаче управляющего сигнала dx1 = 1
счетчик переключается с модуля M0 на M0 – 1
или M0 + 1 в зависимости от значения другого управляющего
сигнала x2, что приводит к появлению переноса P4
на один такт раньше или позже, чем при модуле пересчета M0.
Чем выше частота f0 тактового сигнала, тем меньше
дискретность квантования фазы (дальности до цели) и тем выше качество
имитатора. Задачей курсовой работы является проектирование имитатора сигналов,
параметры которых задаются нажатием клавиш клавиатуры имитатора. Ввод в
микроЭВМ кода нажатой клавиши производится программным методом с квитированием
или по прерыванию. По коду клавиши идентифицируется ее назначение и
производится соответствующее управление работой счетчиков, обеспечивающих
заданные параметры сигналов G и GV.
Схема процессорного блока изображена на рисунке 3 и выполнена с использованием макроэлементов (отдельно макроэлементы представлены на рисунке 4):
74373b – регистр младшего байта адреса,
74244b – буфер старшего байта адреса, lpm_bustri – приемопередатчик системной шины данных, 74157 –
дешифратор системных сигналов управления, вырабатывающий из сигнала ![]() (Read) чтения внешнего устройства I/O или
памяти сигналы
(Read) чтения внешнего устройства I/O или
памяти сигналы ![]() (MemoryRead) – чтение данных из памяти или
(MemoryRead) – чтение данных из памяти или ![]() (I/O Read) – чтение внешнего устройства, а из
сигнала
(I/O Read) – чтение внешнего устройства, а из
сигнала ![]() (Write) записи данных в память или I/O
сигналы
(Write) записи данных в память или I/O
сигналы ![]() (MemoryWrite) – запись данных в память или
(MemoryWrite) – запись данных в память или ![]() (I/O Write) – запись во внешнее устройство в
зависимости от значения сигнала
(I/O Write) – запись во внешнее устройство в
зависимости от значения сигнала ![]() (IO/Memory), указывающего на обращение CPU к
внешнему устройству (
(IO/Memory), указывающего на обращение CPU к
внешнему устройству (![]() ) или к памяти (
) или к памяти (![]() ).
).
A15–8 (AddressBus) – старший байт адреса памяти;
AD7–0 (MultiplexedAddress/DataBus) – мультиплексная шина адреса-данных (в первом такте машинного цикла выдается младший байт адреса A7–0 памяти или адрес внешнего устройства, а в течение второго и третьего тактов машинного цикла – байт данных D7–0);
ALE (AddressLatchEnable) – сигнал фиксации младшего байта адреса A7–0 во внешнем регистре (ALE = 1 в первом такте текущего машинного цикла);
S1, S0 (Status) – сигналы состояния CPU,
указывающие совместно с сигналом ![]() тип операции, которую он будет
выполнять в текущем машинном цикле (в частности, S1 = S0
= 0 – режим останова CPU);
тип операции, которую он будет
выполнять в текущем машинном цикле (в частности, S1 = S0
= 0 – режим останова CPU);
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.