Rп2ст.=r2+r3+ r4 +Rя=0,2+0,119+0,042+0,11=0,471Ом,
Rп3ст.=r3+ r4 +Rя=0,119+0,042+0,11=0,271 Ом,
Rп4ст.= r4 +Rя=0,042+0,11=0,152 Ом.
Строим схему пуска:
3. Определить мощность двигателя, работающего по графику:
I1=35A t1 = 3c t4=15c
I2=17A t2 = 20c t0 = 40c
I3 = 35 A t3 = 2cUH = 220 В
I4= 13A
 |
При расчетах используется метод эквивалентных величин (Iэкв, Мэкв, Рэкв).
Эквивалентный ток:
 ,
,
где I1... In- токи на отдельных участках нагрузочной диаграммы , А;
t1 ...tn время действия этих токов по отдельным участкам нагрузочной диаграммы включая и паузы в работе двигателя,

P=13,4*220=2,98 кВт.
4. Регулирование частоты вращения двигателей постоянного тока посредством изменения потока возбуждения.
Изменение магнитного потока используется преимущественно для регулирования скорости. Этот способ находит широкое применение в ЭП вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цепи возбуждения двигателя и не сопровождается большими потерями мощности.
Магнитный поток при регулировании скорости обычно уменьшают по сравнению с номинальным (точка А на кривой намагничивания рис. 4.8)
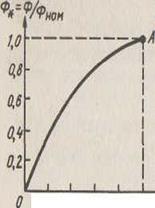
за счет снижения тока возбуждения, так как его увеличение выше номинального вызывает дополнительный нагрев обмотки возбуждения. Кроме того, двигатель рассчитывается и конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока.
|
Рис. 4.8 |
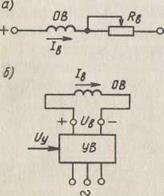
Регулирование тока в цепи возбуждения может осуществляться или с помощью добавочного резистора Rв(рис. 4.9, а), или изменением напряжения питания обмотки возбуждения, например с помощью управляемого выпрямителя УВ (см. рис. 4.9, б), выходное напряжение которого Uв регулируется по сигналу управления Uy. Вторая схема применяется для регулирования в широких пределах тока возбуждения мощных двигателей, работающих в замкнутых структурах ЭП. При использовании в ней реверсивных управляемых выпрямителей обеспечивается также изменение направления тока возбуждения.
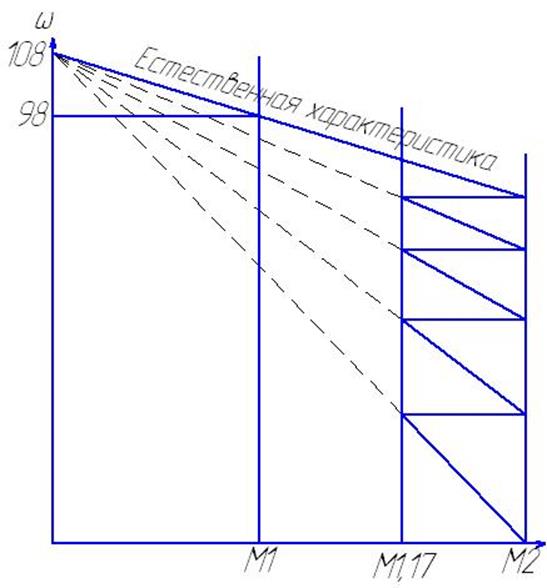
 В соответствии с
(4.7) уменьшение магнитного потока приводит к
увеличению скорости идеального холостого хода ω0. Ток короткого замыкания 1к/з = U/RЯ, т.е. от магнитного
потока не зависит и при его варьировании будет оставаться неизменным. Таким
образом,
электромеханические характеристики при различных значениях магнитного потока Фном>
Ф1 > Ф2 будут иметь вид прямых 1...3, представленных
на рис. 4.10, а.
В соответствии с
(4.7) уменьшение магнитного потока приводит к
увеличению скорости идеального холостого хода ω0. Ток короткого замыкания 1к/з = U/RЯ, т.е. от магнитного
потока не зависит и при его варьировании будет оставаться неизменным. Таким
образом,
электромеханические характеристики при различных значениях магнитного потока Фном>
Ф1 > Ф2 будут иметь вид прямых 1...3, представленных
на рис. 4.10, а.
|
Рис.4.9 |
Момент короткого замыкания Мк = кФ1кз , т. е. при уменьшении магнитного потока Ф он будет также снижаться, так как /кз = const. Значит, механические характеристики двигателя будут иметь вид прямых, показанных на рис. 4.10, б.
Показатели данного способа регулирования скорости ДПТНВ следующие: диапазон регулирования 3 ...4; направление регулирования - вверх от естественной характеристики; плавность регулирования определяется плавностью регулирования тока возбуждения; стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока. Способ экономичен, так как регулирование скорости не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат.
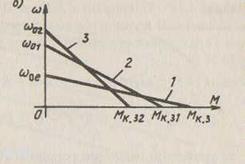
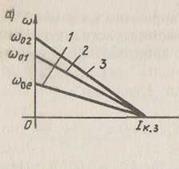
Рис. 4.10
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.