Билет № 19
1) Средства управления с переменной структурой (СУПС)
Аналоговые технические средства управления с переменной структурой (СУПС) являются составной частью комплекса технических средств для локальных информационно-управляющих систем (КТС ЛИУС).
Элементная база КТС ЛИУС-2 представляет собой микросхемы с повышенной степенью интеграции. Основные обрабатывающие и управляющие средства реализованы на однокристальном восьмиразрядном микропроцессоре серии К580 с временем выполнения команд 2-3,5 мкс.
В состав СУПС входят более 30 субблоков, на базе которых можно создавать проектно-компонуемые комплексы. Одним из них является комплекс локального управления КМ 2201, который включает разнообразные средства с широким спектром информационных сигналов (напряжение, ток, частота), позволяющих легко согласовывать их с УВМ и осуществлять управление объектами с изменяющимися динамическими характеристиками с помощью адаптивных регуляторов переменной структуры.
Система построена по макромодульному принципу, имеет два стандартных сигнала 0-20 и 4-20 мА.
Состав комплекса
Субблоки гальванического разделения входных БМАГ1 и выходных БМАГ2 сигналов, в которых развязка осуществляется с помощью оптоэлектронных ключей.
Преобразование переменного напряжения в постоянное осуществляется субблоком БПФН.
Преобразование частотного сигнала в напряжение постоянного тока осуществляется двухканальным блоком БПСН. Обратное преобразование напряжения постоянного тока в частотный сигнал осуществляется субблоком БПНС3.
Преобразование электрических сигналов первичных преобразователей (термопар, термометров сопротивления и др.) в унифицированный токовый сигнал выполняется с помощью двухканального субблока ППНА.
Интегрирование производится субблоком БМАИ1, работающем в режиме запоминания и интегрирования.
Алгебраическое суммирование трех входных унифицированных сигналов напряжения производится с помощью субблока БМАС1.
Селектирование входных аналоговых сигналов (выбор минимального и максимального) осуществляется субблком БМАС3.
Дифференциатором является субблок БМАД1.
Фильтрация входных сигналов осуществляется с помощью адаптивного фильтра БМАФ1.
Аналоговый регулирующий субблок БРАА1 формирует ПИ- и ПИД-законы регулирования и используется как корректирующий прибор в каскадных схемах или режиме непосредственного управления исполнительным механизмом.
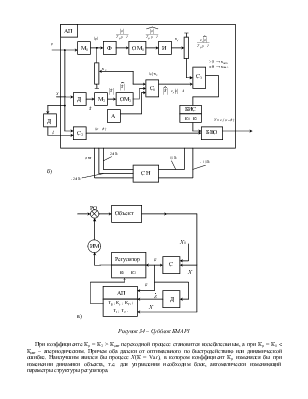
Подстройка (автоматическая) коэффициента передачи аналогового регулятора БРАА1 осуществляется адаптивным субблоком с переменной структурой БМАР1, при изменении параметров динамических характеристик объектов управления в широких пределах.
Сигнализацию заданных уровней, а также двух- и трехпозиционное регулирование осуществляет субблок БМАС2.
Адаптивный субблок с переменной структурой БМАР1 служит для автоматической подстройки коэффициентов передачи аналогового регулятора БРАА1, работающего по ПИД-закону регулирования, при изменении параметров динамических характеристик объектов
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.