Трёхпозиционный регулятор имеет три дискретных значения выходной величины В,0,-В (максимум, норма, минимум). Его закон регулирования описывают уравнениями;
При трёхпозиционном регулировании за счёт включения третьей ступени подачи энергии (вещества) в объект В = норма (при Х=0) процесс регулирования несколько улучшается: амплитуда колебаний уменьшается, а период колебаний увеличивается.
Если позиционное контактное устройство работает в комплекте с исполнительным механизмом, у которого скорость перемещения постоянна, то такие регуляторы обеспечивают позиционное регулирование по закону, описываемому уравнением
 ,
,
где Ти.м - время перемещения регулирующего органа из одного крайнего положения в другое, с.
![]()
Рисунок 5 - Характеристики Рс –регулятора: а - статическая; б - переходная
Процесс регулирования по такому закону представлен на рисунке 5. При таком регулировании на объектах с большим самовыравниванием в системе наблюдается затухание колебаний. Преимущество позиционных регуляторов заключается в простоте и очень быстром приведении регулируемого параметра до установившихся колебаний. Наличие колебаний - значительный недостаток такого регулирования. Поэтому такой способ регулирования применяют на технологических процессах, где допускаются значительные колебания регулируемого параметра.
Регуляторы, формирующие пропорциональный закон, называются пропорциональными или астатическими. У них линейная зависимость между регулирующим воздействием и регулируемым параметром:
y=kpx,
где kp - коэффициент пропорциональности регулятора.
Характеристики этого регулятора изображены на рисунке 6. Временная характеристика (кривая разгона) показана на рисунке 6a. Его передаточная функция определяется формулой: W(p)=kp.
Амплитудно-фазовая характеристика (АФХ) пропорционального регулятора рисунке 6б имеет вид:
W(jω)=W(ω)ejw ,
где W(w)=kp; j(w)=0.
![]()
![]()
Рисунок 6 - Характеристики пропорционального регулятора
У такого регулятора при всех частотах угол сдвига фаз между сигналом на его входе и сигналом на выходе отсутствует. Это значит, что при отклонении регулируемой величины от заданного значения регулирующий орган одновременно с пропорциональной скоростью воздействует на объект регулирования. В этом случае каждому положению регулирующего органа соответствует только одно значение параметра. Поэтому процесс регулирования П–регулятором характеризуется наличием статической ошибки вследствие жёсткой (неизменной во времени) связи между входом и выходом регулятора. Это хорошо видно на примере поплавкового регулятора уровня (рисунок 7). В состоянии равновесия системы, когда приход жидкости V1 в емкость равен ее расходу V2 уровень жидкости соответствует значению H1. При нарушении равенства между приходом и расходом жидкости (допустим, расход увеличился до значения V'2) уровень падает, поплавок 1 перемещается вниз, и через рычажную систему 2 воздействует на регулирующий орган 3, увеличивая приток жидкости в ёмкость. Падение уровня происходит до тех пор, пока приток V'1 не станет равен расходу V'2. При этом система приходит в состояние равновесия, но уже при новом значении уровень Н2. Разность уровней Н2 минус H1 и есть статическая ошибка регулятора. При слишком большом значении коэффициента пропорциональности регулятора (kp) статическая ошибка мала, но переходной процесс протекает в виде медленно затухающих колебаний, приближаясь по характеру к двухпозиционному регулированию (рисунок 8, кривая 1).
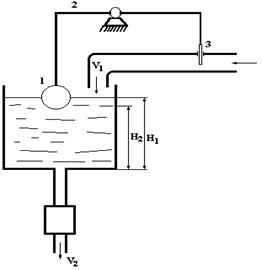
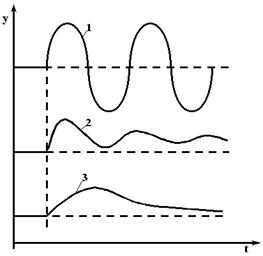
Рисунок 7 - Поплавковый
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.